A implantação de próteses de joelho e anca é uma das operações mais frequentemente realizadas na Suíça, com cerca de 40.000 procedimentos por ano. Apesar da metodologia estabelecida, estudos mostram que até 20% dos pacientes não estão satisfeitos com o resultado alcançado após o implante de uma prótese total de joelho. O risco de revisão de uma prótese de joelho é de cerca de 6% durante os primeiros 5 anos. Cerca de 60% destas revisões ocorrem devido a erros cirúrgicos. Portanto, ainda há necessidade de melhorar a precisão cirúrgica e minimizar os erros cirúrgicos.
A implantação de próteses de joelho e anca é uma das operações mais frequentemente realizadas na Suíça, com cerca de 40.000 procedimentos por ano. Apesar da metodologia estabelecida, estudos mostram que até 20% dos pacientes não estão satisfeitos com o resultado alcançado após o implante de uma prótese total de joelho [1]. De acordo com o Registo Suíço de Próteses, no qual todas as implantações de próteses de joelho e anca são obrigatoriamente registadas, o risco de revisão de uma prótese de joelho é de cerca de 6% nos primeiros 5 anos [2]. Se olharmos de forma crítica para as razões destas revisões, podemos formular que cerca de 60% destas revisões ocorrem devido a erros cirúrgicos. O posicionamento incorrecto dos componentes protéticos e as instabilidades conjuntas são responsáveis por uma proporção significativa das revisões. Os pacientes afectados têm frequentemente um longo período de sofrimento e há custos significativos para o sistema de saúde devido a tratamentos adicionais, operações e possivelmente a incapacidade de trabalhar. Portanto, ainda há necessidade de melhorar a precisão cirúrgica e minimizar os erros cirúrgicos.
Numa grande proporção dos restantes pacientes insatisfeitos, a prótese de joelho é implantada correctamente de acordo com os aspectos técnicos actualmente válidos e o paciente relata, no entanto, limitações na função e resistência do joelho. Neste contexto, surgiu recentemente uma grande discussão na literatura especializada sobre o objectivo correcto para o posicionamento de próteses. Numerosos autores proclamam uma individualização necessária da terapia e do alinhamento das próteses com base na alta variabilidade da anatomia do paciente [3–5]. No entanto, os métodos cirúrgicos manuais estabelecidos têm por objectivo um alinhamento estandardizado e sistemático das próteses mecânicas e uma individualização reprodutível só é possível aqui de forma limitada. Consequentemente, muitos autores vêem a necessidade de apoio técnico ao cirurgião para poder implementar novos conceitos em prótese de joelho e assim reduzir o elevado número de pacientes insatisfeitos mencionados [6,7].
Desenvolvimentos anteriores em assistência informática para cirurgia de substituição de articulações
Já no final dos anos 90, a chamada navegação por computador foi introduzida para aumentar a precisão da implantação e evitar o posicionamento incorrecto das próteses de joelho e da anca. Os sistemas hoje estabelecidos baseiam-se na navegação passiva e sem imaginação. Durante a operação, o cirurgião escaneia pontos de referência anatómicos especiais com uma sonda de infravermelhos. Uma junta modelo genérica de uma base de dados armazenada é então projectada para estas coordenadas, que está disponível para medir o ângulo e determinar o tamanho da prótese. Durante a operação, o cirurgião obtém uma visualização em tempo real do alinhamento do seu corte e implante da serra no ecrã do computador. Ele tem, portanto, o controlo passivo das suas acções.
De acordo com os dados actuais, esta técnica é muito bem adequada para aumentar a precisão de implantação. Várias meta-análises mostram que há menos desvios do objectivo de alinhamento estabelecido em quase todos os níveis [8,9]. Que isto, por sua vez, já leva a uma redução na taxa de revisão não está tão claramente provado. Este efeito é certamente descrito em grandes centros [10], mas em registos de próteses só é visível em análises de subgrupos especiais de, por exemplo, pacientes muito jovens [11]. Contudo, nenhum efeito pode ser demonstrado no que diz respeito ao resultado e satisfação do paciente [12]. Uma das explicações possíveis para esta situação de dados é a contínua falta de individualização da terapia através da utilização de modelos padrão, que só de forma limitada podem descrever as condições anatómicas específicas. Na Suíça, actualmente, cerca de 10% das próteses de joelho são implantadas com o apoio da navegação.
O passo seguinte no apoio técnico cirúrgico é representado pelos modelos de serra (PSI) específicos do paciente, que foram utilizados pela primeira vez em próteses de joelho por volta de 2006 [13]. Com esta tecnologia, a ressonância magnética ou tomografia computorizada é realizada antes da cirurgia e segmentada para criar um modelo personalizado do joelho do paciente. O planeamento individual da operação pode então ser efectuado no computador. A fim de transferir este planeamento para a sala de operações, são calculados e fabricados modelos individuais cortados com serra (impressão 3D), que podem ser posicionados intra-operatoriamente sobre a articulação do joelho. Determina-se a posição da prótese.
De acordo com os dados actuais, foi também descrita uma redução de aberrações de alinhamento em comparação com a implantação manual para esta técnica [14]. No entanto, as PSI são particularmente interessantes devido à possibilidade de individualizar a posição da prótese de acordo com a anatomia do paciente. Alguns estudos e meta-análises mostram que esses cuidados personalizados podem melhorar os resultados dos pacientes [15,16]. No entanto, há também relatórios nas publicações sobre uma maior susceptibilidade a erro dos modelos e por vezes grandes desvios da posição da prótese para o planeamento pré-operatório em pacientes individuais [14,13]. Há também críticas de que apenas os dados de imagem anatómica podem ser utilizados no planeamento informático e que parâmetros dinâmicos como a tensão dos tecidos moles não são abordados. Estas limitações, bem como o planeamento moroso, ainda não levaram a que a tecnologia se tornasse generalizada. Actualmente, cerca de 15% das próteses de joelho são implantadas com a ajuda de PSI na Suíça. Actualmente, a técnica PSI está a ser mais desenvolvida com uma combinação de óculos de realidade aumentada para tornar o planeamento informático visível intra-operativamente e para evitar erros de alinhamento. No entanto, não existem actualmente dados sobre esta matéria, mas sim relatórios iniciais de viabilidade [17].
Sistemas robóticos para operações de substituição conjunta
As primeiras abordagens à cirurgia assistida por robôs em próteses articulares remontam ao final dos anos 90. O “RoboDoc” introduzido na altura era um sistema de fresagem totalmente automático que preparava o osso do fémur para o implante de uma prótese da anca. Tecnologicamente, era um pequeno robot industrial modificado que dependia do objecto – o osso – não se movimentar durante o processo de moagem. Tinha de ser fixado em conformidade. Isto tem causado numerosos problemas e também complicações específicas, de modo que a tecnologia tem sido completamente abandonada na Europa (mesmo depois de muita RP negativa).
Desde essa altura, as tecnologias robotizadas têm-se desenvolvido imensamente. Os sistemas modernos, por exemplo, podem agora reagir a influências externas – por exemplo, o cirurgião – e adaptar dinamicamente o seu plano de operação em tempo real em três dimensões no espaço. Assim, o osso pode agora mover-se durante o processo de fresagem ou serragem e a ferramenta robótica já não é necessariamente guiada autonomamente pelo robô, mas pode ser guiada pelo cirurgião (a chamada tecnologia táctil). O robô apoia assim o cirurgião verificando o plano de serragem correcto e, se necessário, travando o cirurgião se este abandonar o plano cirúrgico. Em contraste com a navegação informática discutida, esta é agora uma ferramenta activa que não só fornece dados sobre o alinhamento das próteses, mas também apoia mais ou menos activamente a implementação do plano cirúrgico.
O que constitui especificamente um robô cirúrgico não é definido com mais detalhe, excepto pela característica de apoiar activamente uma ou mais etapas de trabalho. Até à data, foram aprovados na Suíça quatro sistemas de assistência para próteses articulares, que se descrevem como “assistência cirúrgica robótica” (Tab. 1) . No entanto, diferem consideravelmente nos seus detalhes tecnológicos, manuseamento e possibilidades. Assim, é fundamental considerar a cirurgia robótica como algo uniforme, também em termos de dados clínicos, os seus benefícios e valor acrescentado! A seguir, começaremos por discutir brevemente as principais diferenças entre as tecnologias, a fim de podermos avaliar isto na discussão das provas, porque nem todos os robôs são iguais.

Tecnologia MAKO
A chamada tecnologia MAKO já está em uso clínico desde 2006, inicialmente isolada para próteses parciais de joelho [18]. Mais tarde, foram adicionadas aplicações para próteses totais da anca e, mais recentemente, próteses totais do joelho em 2016. Isto torna-o actualmente o único sistema que pode cobrir toda a gama do joelho e da anca e para o qual existe uma experiência clínica de mais de 10 anos. Em 2018, os primeiros 2 destes sistemas MAKO foram postos em funcionamento em Hirslanden Bern na Suíça e, até à data, já foram realizados mais de 1000 procedimentos com eles. Entretanto, existem mais 2 máquinas na Suíça.
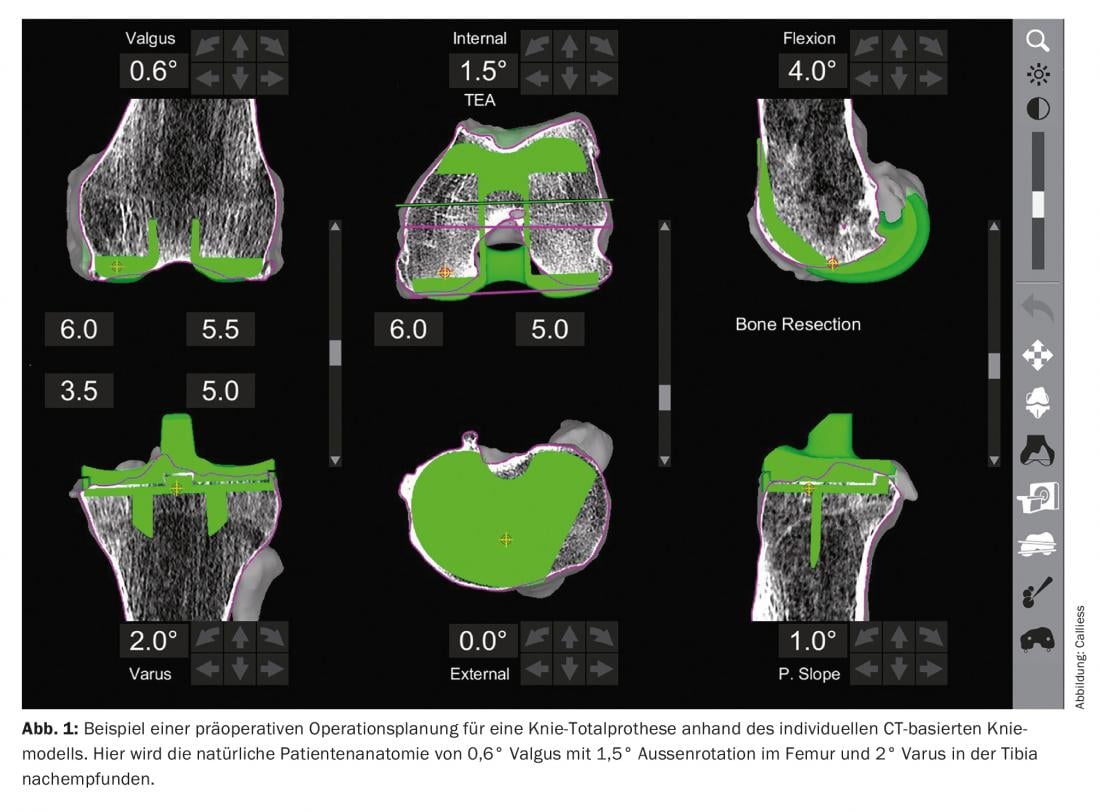
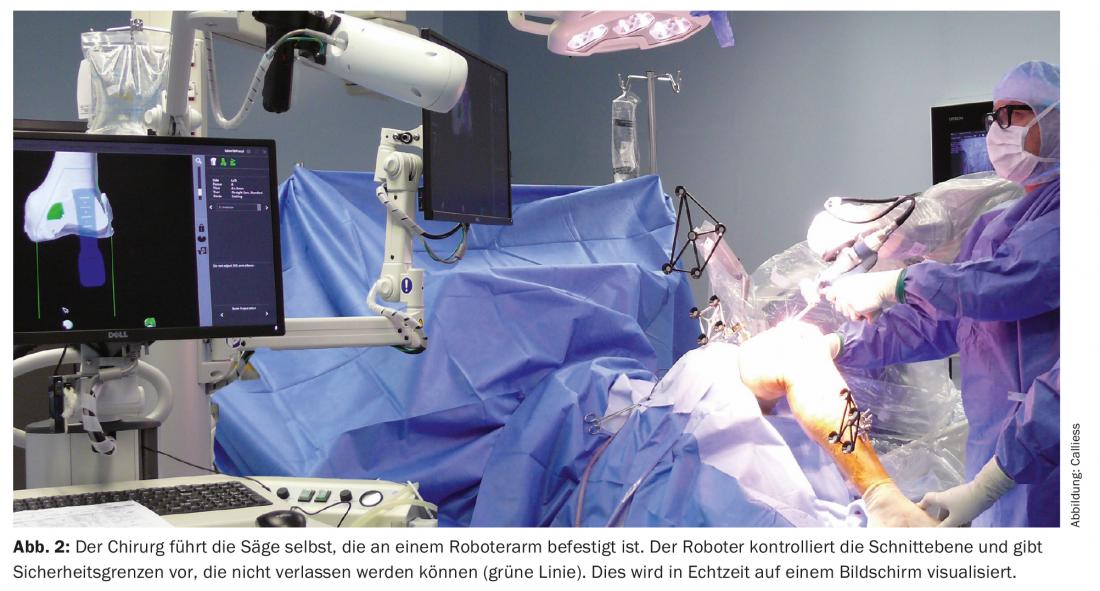
O que é especial nesta tecnologia é que ela se baseia em dados de imagem do paciente (semelhante à tecnologia PSI). Preoperatoriamente, é feita uma TC da anca, do joelho e do tornozelo e segmentada num modelo ósseo individual. Com isto, o cirurgião é capaz de criar um plano de operação individualizado ao paciente já pré-operatório (Fig. 1) . Isto é verificado e afinado intra-operatoriamente usando parâmetros dinâmicos – a tensão ligamentar, o perfil de movimento da articulação do joelho. Após determinação virtual do alinhamento da prótese de betão com base nesta informação, os cortes ou fresagem correspondentes do leito do implante são então efectuados com o apoio do braço do robô táctil. A ferramenta de trabalho é guiada pelo cirurgião, o robô mantém o nível correcto ou estabelece limites para a activação da ferramenta ao travar ou parar a ferramenta de trabalho (Fig. 2). O cirurgião não pode assim abandonar o plano e os tecidos moles circundantes são activamente protegidos. O planeamento baseado na imagem permite a visualização dos osteófitos e também a verificação objectiva da posição final da prótese, tal como a estabilidade ligamentar. Em comparação com o PSI, parâmetros adicionais podem ser tidos em conta e os valores aberrantes de alinhamento podem ser reduzidos através do apoio de robôs.
NAVIO/CORI
O segundo sistema robótico é chamado NAVIO ou CORI na 2ª geração [19]. Está disponível no mercado europeu desde cerca de 2015. Também aqui, estão disponíveis aplicações para próteses parciais e totais na articulação do joelho, enquanto que as aplicações da anca ainda estão em desenvolvimento. Não existem actualmente máquinas CORI em uso na Suíça.
Tecnologicamente, em contraste com o MAKO, é um sistema dito sem imaginação, baseado em modelos. Analógico à navegação por computador discutida, as coordenadas ósseas são determinadas intra-operativamente, que são utilizadas para criar um modelo ósseo genérico. O que é especial então é que, para além deste modelo, o cirurgião pode também tocar na superfície óssea real intra-operatoriamente com uma sonda. Isto cria um pseudo-CT no ecrã que está disponível para o planeamento individualizado. Os parâmetros de movimento dinâmico e estabilidade também podem ser aqui registados, os quais podem ser incorporados no planeamento da cirurgia virtual e no alinhamento da prótese. A parte robótica consiste de uma peça de mão navegada com uma cabeça de moagem. O leito de dentadura é fresado com isto. A cabeça de moagem retrai assim que a área de moagem definida é deixada. Alternativamente, podem ser feitos furos de posicionamento com a fresadora, nos quais são então inseridos blocos de corte de serra convencionais. Neste caso, o cirurgião aplica uma serra convencional guiada à mão através do bloco de corte posicionado sem que este seja guiado roboticamente.
OMNIBOT
O sistema OMNIBot é uma plataforma de navegação complementada com uma unidade robótica passiva [20]. A primeira aplicação clínica foi realizada em 2007, e alguns dispositivos também estão a ser utilizados na Suíça desde 2019. Actualmente, apenas uma aplicação está disponível para o total de próteses de joelho.
O sistema OmniBot é baseado exclusivamente nos princípios descritos de navegação por computador baseada em modelos. O corte da serra tibial é realizado da forma convencional (sem assistência robótica). O que é então especial é que, ao contrário dos outros sistemas, é introduzido um tensor ligamentar controlado por pressão que, ao contrário da determinação subjectiva da estabilidade ligamentar pelo cirurgião, a determina de acordo com parâmetros objectivos. É registada uma curva de estabilidade ao longo de todo o raio de movimento. Estes dados são então utilizados para planear o alinhamento virtual da prótese até se obter uma tensão ligamentar óptima com a prótese. O sistema está actualmente a desenvolver ajudas para o cirurgião. A realização dos cortes da serra no fémur é assistida por uma pequena unidade robótica no osso do fémur que ajusta um modelo de corte da serra convencional ao plano correcto. O cirurgião utiliza portanto a sua serra manual habitual da mesma forma que no sistema acima descrito. O foco deste sistema é portanto menos na reprodução correcta da anatomia óssea e mais na tensão ligamentar optimizada.
ROSA
O representante mais jovem da cirurgia de articulação assistida por robôs é o sistema ROSA [21], que tem sido utilizado em algumas clínicas na Suíça desde 2021. Actualmente, isto também só pode ser utilizado para próteses totais de joelho; as próteses parciais estão actualmente limitadas a centros de desenvolvimento seleccionados.
Tecnologicamente, ROSA, tal como os dois anteriores, é um sistema de navegação sem imaginação, baseado em modelos. No entanto, é possível pré-seleccionar o modelo genérico de joelho pré-operatório com base em imagens de raios X normalizadas, o que permite o pré-planejamento da posição da prótese pré-operatória e deve também reduzir a susceptibilidade a erros no registo do sistema de coordenadas intra-operatórias.
Analógico aos sistemas acima descritos, é possível ler na estabilidade ligamentar intra-operacional e incorporá-la no planeamento virtual da operação. Ao executar a operação, é então utilizado um modelo de serra, que é posicionado no plano correcto por meio de um braço robótico. A própria serra é cortada manualmente com uma serra convencional, tal como descrito acima.
Outros sistemas estão actualmente em desenvolvimento, cada um com as suas próprias características específicas. No entanto, ainda não têm autorização de comercialização para a Suíça. Globalmente, a robótica na Suíça ainda se encontra numa fase inicial. Em 2021, menos de 3% das próteses primárias do joelho foram implantadas utilizando os sistemas robóticos mencionados [2].
Base de provas actual
Aumentar a precisão e exactidão
De acordo com os diferentes comprimentos de disponibilidade clínica dos sistemas descritos, a situação de evidência é muito heterogénea. Comum a todos os sistemas é o objectivo de aumentar a precisão cirúrgica e evitar a colocação incorrecta de implantes. Isto é fácil de verificar metodicamente utilizando análises de resultados radiológicos. Sem surpresas, existem relatórios positivos correspondentes para todas as tecnologias mencionadas, segundo os quais este objectivo principal parece ser atingido em segurança [19,20,22,23]. Foi provada uma alta precisão na obtenção da posição desejada da prótese e uma redução dos desvios (outliers) na posição do eixo da perna em comparação com a implantação manual. As diferenças claras entre os sistemas e tecnologias ainda não foram descritas.
No nosso próprio trabalho comparativo, uma vez investigámos a precisão para o correcto dimensionamento da prótese entre o implante convencional, manual, o sistema MAKO guiado por imagem e o sistema NAVIO sem imagem para próteses parciais [24]. Ambos os métodos assistidos por robôs são superiores à técnica manual em parâmetros clinicamente relevantes. Uma comparação directa das tecnologias mostra um benefício para a técnica MAKO baseada em CT. Assim, parece haver uma vantagem no planeamento devido à anatomia óssea pré-operacional visível; as regiões intraoperacionais são claramente visualizadas e é possível distinguir entre os ossos nativos e os osteófitos formados. Além disso, a fonte de erro “cirurgião” é reduzida quando se regista o sistema de coordenadas.
Redução de complicações e revisões
Com base nas provas positivas para uma maior precisão cirúrgica e prevenção de erros, coloca-se novamente a questão de saber se isto também leva (automaticamente) a uma redução na taxa de revisão e complicações?
Duas meta-análises recentes foram publicadas no ano passado sobre este aspecto da taxa de complicações, que inicialmente não encontrou diferença nas próteses de joelho assistidas por robôs em comparação com a norma manual [25,26]. Contudo, é de notar que a literatura de 2007-2019, ou 2019-2020, foi incluída – ou seja, publicações bastante antigas sobre cada tecnologia, incluindo potencialmente a curva de aprendizagem, quando medida em relação à experiência clínica. Para além disso, a literatura invariavelmente analisa a taxa de revisão antecipada (geralmente os primeiros 90 dias!), que muitas vezes não está primariamente relacionada com erros técnicos no posicionamento de próteses – ou seja, infecções, distúrbios de cicatrização de feridas ou fracturas.
Se observarmos a taxa de revisão de parâmetros para próteses de joelho assistidas por robôs em comparação com implantações manuais, o Australian Prosthesis Register é particularmente interessante de considerar [11]. Na Austrália, a técnica cirúrgica utilizada é registada com grande detalhe (em contraste com a maioria dos outros registos) e uns bons 70% das implantações de próteses de joelho aí realizadas com a ajuda de tecnologia informática e robótica. O método assistido por robô já representou 16,6% do total das substituições do joelho em 2021 e até 30% das substituições parciais.
Nos dados de registo de 2021, é mostrada uma vantagem mínima para a robótica para o total de próteses de joelho para a taxa de revisão de 3 anos registada até à data, mas actualmente sem significado estatístico claro. Aqui, o seguimento mais longo ainda está para ser visto.
Na prótese parcial de joelho – geralmente uma operação em que a precisão do posicionamento da prótese desempenha um papel maior e é mais propensa a erros – emerge um quadro interessante: O relatório anual do registo de próteses de 2019 mostrou uma vantagem altamente significativa da prótese parcial de joelho assistida por robot em relação ao padrão manual após 3 anos. Na altura, era quase exclusivamente o sistema MAKO que estava representado nestes dados e centros grandes e especializados que foram os primeiros a introduzir a técnica. No actual relatório de 2021, este efeito da taxa de complicação reduzida já não é significativo. Uma explicação possível para isto são as tecnologias agora muito diferentes, que são aqui resumidas sob o termo “robô-assistido” e também os numerosos novos utilizadores, que possivelmente influenciam os dados com a sua curva de aprendizagem. Como antes, a prótese parcial utilizada em conjunto com a tecnologia MAKO é a que tem a mais baixa taxa de revisão no Registo Australiano. No SIRIS, apenas a prótese parcial MAKO pode ser claramente identificada [2]. Também aqui, a taxa de revisão de 2 anos é significativamente inferior à média: 1,8% vs. 4,6%. Se olharmos novamente para dados de meta-análises e grandes centros especificamente para próteses parciais de joelho, encontramos também uma diferença estatisticamente significativa na taxa de revisão por tecnologia robotizada [27,28].
Curva de aprendizagem e custos
Como acabou de ser mencionado, é bastante concebível que a curva de aprendizagem do operador tenha uma influência sobre os parâmetros discutidos. Actualmente, a literatura avalia principalmente a curva de aprendizagem em relação ao tempo de operação. Aqui é demonstrado que o trabalho eficiente com o robô é aprendido rapidamente e que após apenas alguns casos (7-20 dependendo do autor) se consegue um tempo de funcionamento reprodutível e apenas ligeiramente prolongado [26,29]. Alguns trabalhos podem mesmo provar que no curso uma redução adicional do tempo de operação é possível até ser neutra para o fluxo de trabalho pré-robótico após cerca de 100 casos. No entanto, isto requer um elevado número de casos e uma elevada percentagem de adaptação da tecnologia.
Em termos de precisão cirúrgica – ou seja, a execução precisa dos cortes da serra – não parece haver uma curva de aprendizagem significativa [30]. Conseguimos provar num estudo que mesmo um cirurgião menos experiente pode realizar uma alta precisão de implantação graças à técnica robótica [31]. No entanto, a taxa de complicações foi ainda aumentada nestes cirurgiões inexperientes em comparação com os dados apresentados para os centros especializados com experiência em robôs.
Isto leva-me a um ponto de discussão essencial da curva de aprendizagem que está subrepresentado na literatura: a tomada de decisões intra-operatórias adequadas. A assistência robótica ajuda claramente o cirurgião na melhor execução de um plano cirúrgico, mas não na criação e afinação deste plano (pelo menos de acordo com o estado actual da arte). Fornece uma série de dados e informações adicionais sobre os parâmetros conjuntos e dinâmicos que têm de ser registados e interpretados pelo cirurgião. Também podem ocorrer erros e a prótese pode não estar posicionada de forma óptima, mesmo na fase de planeamento. A este respeito, é necessário um elevado nível de experiência com os sistemas, bem como uma aprendizagem permanente com base nos parâmetros disponíveis para melhorar e desenvolver ainda mais os algoritmos de decisão. Esta circunstância representa um certo obstáculo para muitos operadores na adaptação à nova tecnologia. Um elevado grau de especialização e de carga de processos com a robótica parece assim indispensável apesar do apoio tecnológico activo.
Um segundo factor neste contexto diz respeito aos custos adicionais das tecnologias, que não se reflectem no actual sistema de remuneração e tornam mais difícil a utilização generalizada da robótica. De acordo com um estudo separado, os custos adicionais ascendem a cerca de 1600-2500 CHF por procedimento, dependendo da tecnologia utilizada (sem imagem vs. suportada por CT) [32]. Existe uma dependência parcial do número de casos e também da eficiência dos processos de trabalho do cirurgião e do departamento operacional. O planeamento e a configuração puramente intra-operatória parecem ser mais demorados aqui do que uma opção de planeamento pré-operatório.
Resultado do paciente
Por último mas não menos importante, um dos factores decisivos para avaliar o valor acrescentado da robótica em intervenções conjuntas continua a ser a melhoria do resultado e da satisfação do paciente. Esta é a única forma de justificar os custos adicionais, se o efeito da redução de custos através da redução das operações de revisão for actualmente bastante reduzido.
Já existem alguns dados bons e fiáveis sobre próteses parciais de joelho. Canetti e os co-autores descrevem um regresso mais rápido à capacidade desportiva após a prótese parcial assistida por robô [33]. O grupo de investigação liderado por Marc Blyth conseguiu demonstrar num estudo prospectivo, aleatório e duplo-cego, que as articulações robóticas do joelho mostraram uma reabilitação mais rápida em média e menos dor pós-operatória do que o grupo de comparação operado convencionalmente [34]. No entanto, 1 ano de pós-operatório, não foi detectada qualquer diferença significativa. Este efeito foi descrito em outros estudos. Na interpretação, a redução da dor pós-operatória deve-se presumivelmente à técnica cirúrgica que é mais suave nos tecidos moles, que se aplica sobretudo às rebarbas controladas por robôs (MAKO, NAVIO).
A situação dos dados para o total de próteses de joelho é também bastante positiva. Uma meta-análise recentemente publicada mostra um benefício significativo para a função do joelho e o resultado relatado pelos pacientes no que diz respeito à substituição total do joelho assistida por robôs – Nível de evidência: bom [26]. Analogamente às experiências descritas com a PSI, os estudos que se destacam em particular são os que utilizam a possibilidade de planeamento virtual tridimensional de tal forma que a prótese é implantada de uma forma individualizada para o paciente. Vários autores esclarecem que o resultado é significativamente melhor se a anatomia pré-artrótica puder ser reconstruída com a prótese [35-37]. Seguir os mesmos conceitos mecanicamente orientados que os derivados da técnica manual não melhora o resultado do paciente.
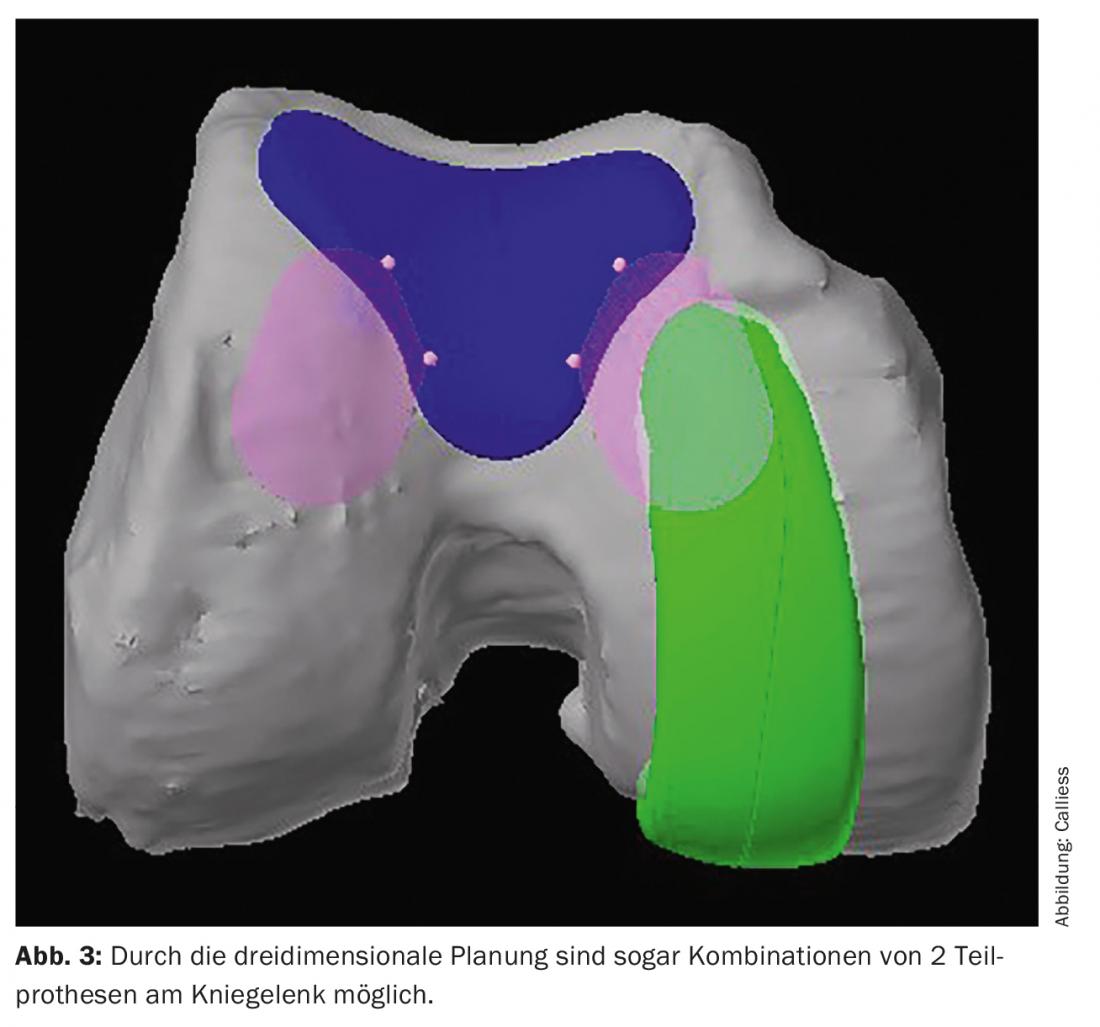
Outro aspecto interessante para melhorar o resultado do paciente é a utilização mais frequente de soluções protéticas parciais em vez de próteses totais com a ajuda da robótica. Ou a combinação de duas próteses parciais com a preservação dos ligamentos cruzados em vez de uma prótese total ressecando os ligamentos cruzados (Fig. 3). Como demonstrado, um contra-argumento importante da prótese parcial – o aumento da taxa de revisão – parece ser bem abordado pelo suporte robótico. Dado que a prótese parcial é superior à prótese total em termos de resultado do paciente quando indicada correctamente, um aumento na proporção de próteses parciais é já uma melhoria no resultado do paciente. Por exemplo, realizamos agora cerca de 45% das nossas implantações de próteses de joelho como próteses parciais, ao contrário da média suíça de actualmente cerca de 17% [2].
Valor acrescentado ou marketing?
Se voltarmos agora brevemente à questão inicial de certa forma publicitária, pode resumir-se que, na área das próteses parciais de joelho, foi provado um verdadeiro valor acrescentado através do apoio robótico. Embora o resultado do paciente de uma prótese parcial assistida por robô a médio prazo não seja necessariamente melhor do que uma prótese operada convencionalmente, a reabilitação é reduzida e o risco de revisão é significativamente reduzido. Se forem implantadas mais próteses parciais em vez de próteses totais devido à utilização de robôs, o sistema de saúde também beneficiará de um ponto de vista económico global: as próteses parciais têm comparativamente menos complicações, uma maior qualidade de vida e custos de tratamento globalmente mais baixos. Os custos adicionais devidos à utilização de robôs são absorvidos por estes efeitos.
No caso de próteses totais de joelho, o valor acrescentado cientificamente confirmado em termos de risco de reabilitação e revisão é ainda menos claramente demonstrado. Contudo, a robótica mostra o valor acrescentado de que a anatomia natural do paciente pode ser melhor tomada em consideração e é possível uma individualização da terapia com base em parâmetros de decisão objectivos. Isto demonstrou ter o potencial de melhorar a qualidade dos cuidados e dos resultados. No entanto, se forem aplicados os mesmos princípios cirúrgicos das próteses convencionais de joelho, o valor acrescentado é baixo.
Mensagens Take-Home
- Na Suíça, apenas cerca de 3% das próteses de joelho têm actualmente suporte robótico.
- A assistência robótica guiada por imagem leva a uma redução significativa na taxa de revisão das hemipróteses do joelho (1,8% vs. 4,6% após 2 anos).
- Para próteses totais de joelho, é possível o ajuste/alinhamento individualizado de próteses com alta precisão. Isto melhora o resultado do paciente.
- Desvantagens actuais: elevados custos operacionais e curva de aprendizagem para o operador individual.
Literatura:
- Rodriguez-Merchan CE: Satisfação do paciente após artroplastia primária total do joelho: Factores contribuidores. Arco Bone Jt Surg 2021; 9 (4): 379-386; doi: 10.22038/abjs.2020.46395.2274.
- Relatório Anual do Registo Nacional Conjunto Suíço, Hip and Knee 2012-2021. https://swiss-medtech.ch/news/siris-report-2021
- Beckmann J, Meier MK, Benignus C, et al: Artroplastia contemporânea do joelho: uma serve para todos ou tempo para a diversidade? Arch Orthop Trauma Surg 2021; 141 (12): 2185-2194; doi: 10.1007/s00402-021-04042-4.
- Riviere C, Lazic S, Boughton O, et al: Conceitos actuais para o alinhamento de implantes no joelho: específicos do paciente ou sistemáticos? EFORT Open Rev 2018; 3 (1): 1-6; doi: 10.1302/2058-5241.3.170021.
- Riviere C, Iranpour F, Auvinet E, et al: Opções de alinhamento para artroplastia total do joelho: Uma revisão sistemática. Orthop Traumatol Surg Res 2017; 103 (7): 1047-1056; doi: 10.1016/j.otsr.2017.07.010.
- Ettinger M, Tucking LR, Savov P: [Kinematic alignment in total knee arthroplasty with image-based and image-independent robotic support]. Ortopedia 2020; 49(7): 604-610; doi: 10.1007/s00132-020-03924-6.
- Urish KL, Conditt M, Roche M, Rubash HE: Robotic Total Knee Arthroplasty: Surgical Assistant for a Customized Normal Kinematic Knee. Ortopedia 2016; 39(5): e822-827; doi: 10.3928/01477447-20160623-13.
- Cheng T, Zhao S, Peng X, Zhang X: A cirurgia assistida por computador melhora o alinhamento pós-operatório das pernas e o posicionamento dos implantes após uma artroplastia total do joelho? Uma meta-análise de ensaios controlados aleatorizados? Cirurgia do joelho, traumatologia desportiva, artroscopia: jornal oficial da ESSKA 2012; 20(7): 1307-1322; doi: 10.1007/s00167-011-1588-8.
- Fu Y, Wang M, Liu Y, Fu Q: Resultados do alinhamento na artroplastia total do joelho navegado: uma meta-análise. Cirurgia do joelho, traumatologia desportiva, artroscopia: jornal oficial da ESSKA 2012; 20 (6): 1075-1082; doi: 10.1007/s00167-011-1695–1696.
- Baier C, Wolfsteiner J, Otto F, et al: Resultados clínicos, radiológicos e de sobrevivência após dez anos comparando a artroplastia total de joelho navegada e a artroplastia total convencional: uma análise de pares combinados. Ortopedia internacional 2017; 41(10): 2037-2044; doi: 10.1007/s00264-017-3509-z.
- Australian Orthopaedic Association National Joint Replacement Registry Annual Report 2021. https://aoanjrr.sahmri.com/annual-reports-2021.
- Lee DY, Park YJ, Hwang SC, et al: Sem diferenças nos resultados a médio e longo prazo da navegação assistida por computador versus a artroplastia total do joelho convencional. Cirurgia do joelho, traumatologia desportiva, artroscopia: jornal oficial da ESSKA 2020; 28(10): 3183-3192; doi: 10.1007/s00167-019-05808-5.
- Calliess T, Ettinger M, Stukenborg-Colsmann C, Windhagen H: [Alinhamento cinemático à medida em artroplastia total do joelho usando PSI. A história da tecnologia ShapeMatch]. O Ortopédico 2016; 45 (4): 314-321; doi: 10.1007/s00132-016-3240-2.
- Thienpont E, Schwab PE, Fennema P: Eficácia dos instrumentos específicos do paciente na Artroplastia Total do Joelho: Uma Revisão Sistemática e Meta-Análise. The Journal of bone and joint surgery American 2017; 99 (6): 521-530; doi: 10.2106/JBJS.16.00496.
- Woon JTK, Zeng ISL, Calliess T, et al: Resultado do alinhamento cinemático utilizando instrumentos específicos do paciente versus alinhamento mecânico em TKA: uma meta-análise e análise de subgrupos de ensaios aleatórios. Arch Orthop Trauma Surg 2018; 138(9): 1293-1303; doi: 10.1007/s00402-018-2988-8.
- Calliess T, Bauer K, Stukenborg-Colsman C, et al: Cinemático PSI versus alinhamento mecânico nãoPSI em artroplastia total do joelho: um estudo prospectivo, randomizado. Cirurgia do joelho, traumatologia desportiva, artroscopia: jornal oficial da ESSKA 2017; 25(6): 1743-1748; doi: 10.1007/s00167-016-4136-8.
- Fucentese SF, Koch PP: Um novo sistema de orientação cirúrgica baseado na realidade aumentada para artroplastia total do joelho. Arch Orthop Trauma Surg 2021; 141(12): 2227-2233; doi: 10.1007/s00402-021-04204-4.
- Roche M: O sistema MAKO de artroplastia robótica do joelho. Arco Orthop Trauma Surg 2021; 141(12): 2043-2047; doi: 10.1007/s00402-021-04208-0.
- Sicat CS, Chow JC, Kaper B, et al: Precisão de colocação de componentes em duas gerações de artroplastia de joelho assistida por robótica de mão. Arch Orthop Trauma Surg 2021; 141(12): 2059-2067; doi: 10.1007/s00402-021-04040-6.
- Shatrov J, Murphy GT, Duong J, Fritsch B: artroplastia total do joelho assistida por robôs com a plataforma OMNIBot: uma revisão dos princípios de utilização e resultados. Arch Orthop Trauma Surg 2021; 141(12): 2087-2096; doi: 10.1007/s00402-021-04173-8.
- Batailler C, Hannouche D, Benazzo F, Parratte S: Conceitos e técnicas de uma nova técnica roboticamente assistida para artroplastia total do joelho: o sistema de joelho ROSA. Arch Orthop Trauma Surg 2021; 141(12): 2049-2058; doi: 10.1007/s00402-021-04048-y.
- Parratte S, Price AJ, Jeys LM, et al: Accuracy of a New Robotically Assisted Technique for Total Knee Arthroplasty: A Cadaveric Study. J Arthroplasty 2019; 34(11): 2799-2803; doi: 10.1016/j.arth.2019.06.040.
- Batailler C, Fernandez A, Swan J, et al: MAKO CT baseado em sistema robótico de braço assistido é um procedimento fiável para artroplastia total do joelho: uma revisão sistemática. Knee Surg Sports Traumatol Arthrosc 2021; 29(11): 3585-3598; doi: 10.1007/s00167-020-06283-z.
- Batailler C, Bordes M, Lording T, et al: Dimensionamento melhorado com sistema robotizado assistido por imagem em comparação com técnicas sem imagem e convencionais em artroplastia unicompartimental medial do joelho. Junta Óssea J 2021; 103-B(4): 610-618; doi: 10.1302/0301-620X.103B4.BJJ-2020-1453.R1.
- Chin BZ, Tan SSH, Chua KCX, et al: Robot-Assisted versus Conventional Total and Unicompartmental Knee Arthroplasty: A Meta-analysis of Radiological and Functional Outcomes. J Knee Surg 2021; 34(10): 1064-1075; doi: 10.1055/s-0040-1701440.
- Zhang J, Ndou WS, Ng N, et al: A artroplastia total assistida por braço robótico do joelho está associada a uma maior precisão e resultados relatados pelos pacientes: uma revisão sistemática e uma meta-análise. Knee Surg Sports Traumatol Arthrosc 2021; doi: 10.1007/s00167-021-06464-4.
- Batailler C, White N, Ranaldi FM, et al: Melhor posição do implante e menor taxa de revisão com artroplastia unicompartimental do joelho assistida por robótica. Knee Surg Sports Traumatol Arthrosc 2019; 27(4): 1232-1240; doi: 10.1007/s00167-018-5081-5.
- Sun Y, Liu W, Hou J, et al: A artroplastia unicompartimental do joelho com assistência robótica tem taxas de complicação e revisão mais baixas do que o procedimento convencional? Uma revisão sistemática e uma meta-análise. BMJ Open 2021; 11(8): e044778; doi: 10.1136/bmjopen-2020-044778.
- Chen Z, Bhowmik-Stoker M, Palmer M, et al: Curva de Aprendizagem Baseada no Tempo para Artroplastia Total de Joelho Assistida por Robótica: Um Estudo Multicêntrico. J Knee Surg 2022; doi: 10.1055/s-0042-1744193.
- Vermue H, Luyckx T, Winnock de Grave P, et al: A artroplastia total do joelho assistida por robot está associada a uma curva de aprendizagem para o tempo cirúrgico mas não para o alinhamento de componentes, alinhamento de membros e equilíbrio de fendas. Knee Surg Sports Traumatol Arthrosc 2022; 30(2): 593-602; doi: 10.1007/s00167-020-06341-6.
- Savov P, Tuecking LR, Windhagen H et al: A robótica melhora a precisão do alinhamento e reduz as taxas de revisão antecipada para UKA nas mãos de cirurgiões de baixo volume de UKA. Arch Orthop Trauma Surg 2021; 141(12): 2139-2146; doi: 10.1007/s00402-021-04114-5.
- Christen B, Tanner L, Ettinger M, et al: Comparative Cost Analysis of Four Different Computer-Assisted Technologies to Implant a Total Knee Arthroplasty over Conventional Instrumentation. J Pers Med 2022; 12(2); doi: 10.3390/jpm12020184.
- Canetti R, Batailler C, Bankhead C, et al: Retorno mais rápido ao desporto após artroplastia unicompartimental lateral do joelho assistida por robótica: um estudo comparativo. Arco Orthop Trauma Surg 2018; 138 (12): 1765-1771; doi: 10.1007/s00402-018-3042-6.
- Gilmour A, MacLean AD, Rowe PJ, et al: Robotic-Arm-Assisted vs Conventional Unicompartmental Knee Arthroplasty. Os Resultados Clínicos de 2 Anos de um Ensaio Controlado Aleatório. J Arthroplasty 2018; 33 (7S): S109-S115; doi: 10.1016/j.arth.2018.02.050.
- Huber K, Christen B, Calliess S, Calliess T: True Kinematic Alignment Is Applicable in 44% of Patients Applying Restrictive Indication Criteria-A Retrospective Analysis of 111 TKA Using Robotic Assistance. J Pers Med 2021; 11 (7); doi: 10.3390/jpm11070662.
- Winnock de Grave P, Luyckx T, Claeys K, et al: Maior satisfação após artroplastia total do joelho usando um alinhamento cinemático inverso restrito em comparação com o alinhamento mecânico ajustado. Knee Surg Sports Traumatol Arthrosc 2022; 30 (2): 488-499; doi: 10.1007/s00167-020-06165-4.
- Elbuluk AM, Jerabek SA, Suhardi VJ, et al: Head-to-Head Comparison of Kinematic Alignment Versus Mechanical Alignment for Total Knee Arthroplasty. J Arthroplasty 2022; doi: 10.1016/j.arth.2022.01.052.
PRÁTICA DO GP 2022; 18(4): 6-13