L’impianto di protesi del ginocchio e dell’anca è uno degli interventi più frequenti in Svizzera, con circa 40.000 procedure all’anno. Nonostante la metodologia consolidata, gli studi dimostrano che fino al 20% dei pazienti non è soddisfatto del risultato ottenuto dopo l’impianto di una protesi totale di ginocchio. Il rischio di revisione per una protesi di ginocchio è di circa il 6% entro i primi 5 anni. Circa il 60% di queste revisioni avviene a causa di errori chirurgici. Quindi c’è ancora bisogno di migliorare la precisione chirurgica e di ridurre al minimo gli errori chirurgici.
L’impianto di protesi del ginocchio e dell’anca è uno degli interventi più frequenti in Svizzera, con circa 40.000 procedure all’anno. Nonostante la metodologia consolidata, gli studi dimostrano che fino al 20% dei pazienti non è soddisfatto del risultato ottenuto dopo l’impianto di una protesi totale di ginocchio [1]. Secondo il Registro svizzero delle protesi, in cui vengono registrati obbligatoriamente tutti gli impianti di protesi del ginocchio e dell’anca, il rischio di revisione per una protesi del ginocchio è di circa il 6% entro i primi 5 anni [2]. Se si guarda con occhio critico alle ragioni di queste revisioni, si può formulare che circa il 60% di queste revisioni avviene a causa di errori chirurgici. Il posizionamento errato dei componenti protesici e le instabilità articolari insieme sono responsabili di una percentuale significativa di revisioni. I pazienti colpiti hanno spesso un lungo periodo di sofferenza e ci sono costi significativi per il sistema sanitario a causa di trattamenti aggiuntivi, operazioni e probabilmente l’impossibilità di lavorare. Quindi c’è ancora bisogno di migliorare la precisione chirurgica e di ridurre al minimo gli errori chirurgici.
In un’ampia percentuale dei restanti pazienti insoddisfatti, la protesi di ginocchio viene impiantata correttamente secondo gli aspetti tecnici attualmente validi e il paziente riferisce comunque limitazioni nella funzione e nella resistenza del ginocchio. In questo contesto, nella letteratura specialistica sono sorte di recente molte discussioni sull’obiettivo corretto per il posizionamento della protesi. Numerosi autori proclamano una necessaria individualizzazione della terapia e dell’allineamento della protesi, basata sull’elevata variabilità dell’anatomia del paziente [3–5]. Tuttavia, i metodi chirurgici manuali consolidati mirano a un allineamento meccanico standardizzato e sistematico della protesi e un’individualizzazione riproducibile è possibile solo in misura limitata. Di conseguenza, molti autori vedono la necessità di un supporto tecnico per il chirurgo, per poter implementare nuovi concetti nella protesi di ginocchio e ridurre così l’elevato numero di pazienti insoddisfatti di cui si parla [6,7].
Sviluppi precedenti nell’assistenza computerizzata per l’intervento di sostituzione dell’articolazione
Già alla fine degli anni ’90, è stata introdotta la cosiddetta navigazione computerizzata per aumentare l’accuratezza dell’impianto ed evitare il posizionamento errato delle protesi del ginocchio e dell’anca. I sistemi oggi esistenti si basano sulla navigazione passiva, senza immagini. Durante l’operazione, il chirurgo scansiona speciali punti di riferimento anatomici con una sonda a infrarossi. Un modello generico di articolazione da un database memorizzato viene poi proiettato in queste coordinate, che sono disponibili per misurare l’angolo e determinare la dimensione della protesi. Durante l’intervento, il chirurgo visualizza in tempo reale l’allineamento del taglio della sega e dell’impianto sullo schermo del computer. Pertanto, ha un controllo passivo delle sue azioni.
Secondo i dati attuali, questa tecnica è molto adatta per aumentare la precisione dell’impianto. Diverse meta-analisi mostrano che ci sono meno deviazioni dall’obiettivo di allineamento impostato a quasi tutti i livelli [8,9]. Che questo, a sua volta, porti già a una riduzione del tasso di revisione, non è dimostrato in modo così chiaro. Questo effetto è certamente descritto nei grandi centri [10], ma nei registri delle protesi è visibile solo in analisi di sottogruppi speciali, ad esempio di pazienti molto giovani [11]. Tuttavia, non è possibile dimostrare alcun effetto per quanto riguarda l’esito e la soddisfazione del paziente [12]. Una delle possibili spiegazioni di questa situazione dei dati è la continua mancanza di individualizzazione della terapia attraverso l’uso di modelli standard, che possono rappresentare le condizioni anatomiche specifiche solo in misura limitata. Oggi in Svizzera, circa il 10% delle protesi di ginocchio viene impiantato con il supporto della navigazione.
Il passo successivo nel supporto tecnico chirurgico è rappresentato dalle sagome di taglio a sega specifiche per il paziente (PSI), che sono state utilizzate per la prima volta nella protesi di ginocchio intorno al 2006 [13]. Con questa tecnologia, la risonanza magnetica o la tomografia computerizzata vengono eseguite prima dell’intervento e segmentate per creare un modello di ginocchio personalizzato del paziente. La pianificazione delle operazioni individuali può quindi essere eseguita al computer. Per trasferire questa pianificazione in sala operatoria, vengono calcolate e realizzate delle sagome individuali con taglio a sega (stampa 3D), che possono essere posizionate intraoperatoriamente sull’articolazione del ginocchio. Lei determina la posizione della protesi.
Secondo i dati attuali, per questa tecnica è stata descritta anche una riduzione degli outlier di allineamento rispetto all’impianto manuale [14]. Tuttavia, le PSI sono particolarmente interessanti per la possibilità di personalizzare la posizione della protesi in base all’anatomia del paziente. Alcuni studi e meta-analisi dimostrano che tale assistenza personalizzata può migliorare i risultati dei pazienti [15,16]. Tuttavia, le pubblicazioni riportano anche una maggiore suscettibilità all’errore delle mascherine e talvolta grandi deviazioni della posizione della protesi rispetto alla pianificazione preoperatoria in singoli pazienti [14,13]. C’è anche una critica sul fatto che nella pianificazione computerizzata si possono utilizzare solo i dati delle immagini anatomiche e che non si tiene conto dei parametri dinamici, come la tensione dei tessuti molli. Queste limitazioni, così come la pianificazione che richiede molto tempo, non hanno ancora portato alla diffusione della tecnologia. Attualmente, circa il 15% delle protesi di ginocchio viene impiantato con l’aiuto di PSI in Svizzera. Attualmente, la tecnica PSI è in fase di ulteriore sviluppo con una combinazione di occhiali a realtà aumentata per rendere visibile la pianificazione computerizzata intraoperatoria ed evitare errori di allineamento. Tuttavia, al momento non ci sono dati in merito, piuttosto rapporti di fattibilità iniziali [17].
Sistemi robotici per operazioni di sostituzione dell’articolazione
I primi approcci alla chirurgia robot-assistita nella protesi articolare risalgono alla fine degli anni Novanta. Il “RoboDoc” presentato all’epoca era un sistema di fresatura completamente automatico che preparava l’osso del femore per l’impianto di una protesi dell’anca. Tecnologicamente, si trattava di un robot industriale leggermente modificato che dipendeva dal fatto che l’oggetto – l’osso – non si muovesse durante il processo di fresatura. Doveva essere sistemato di conseguenza. Questo ha causato numerosi problemi e anche complicazioni specifiche, tanto che la tecnologia è stata completamente abbandonata in Europa (anche dopo molte PR negative).
Da allora, le tecnologie robotiche si sono sviluppate immensamente. I sistemi moderni, ad esempio, possono ora reagire alle influenze esterne – ad esempio il chirurgo – e adattare dinamicamente il loro piano operativo in tempo reale in tre dimensioni nello spazio. L’osso può quindi muoversi durante il processo di fresatura o segatura e lo strumento robotico non è più necessariamente guidato autonomamente dal robot, ma può essere guidato dal chirurgo (la cosiddetta tecnologia aptica). Il robot supporta quindi il chirurgo controllando il piano di taglio corretto e, se necessario, frenando il chirurgo se esce dal piano chirurgico. A differenza della navigazione computerizzata di cui si è parlato, ora si tratta di uno strumento attivo che non solo fornisce dati sull’allineamento della protesi, ma supporta anche in modo più o meno attivo l’attuazione del piano chirurgico.
Ciò che costituisce specificamente un robot chirurgico non è definito in modo più dettagliato, tranne che per la caratteristica di supportare attivamente una o più fasi di lavoro. Ad oggi, in Svizzera sono stati approvati quattro sistemi di assistenza per protesi articolari, che si definiscono “assistenza chirurgica robotica” (Tab. 1) . Tuttavia, differiscono notevolmente nei dettagli tecnologici, nella gestione e nelle possibilità. Di conseguenza, è fondamentale considerare la chirurgia robotica come qualcosa di uniforme, anche in termini di dati clinici, benefici e valore aggiunto! Di seguito, discuteremo brevemente le principali differenze tra le tecnologie, per poterle valutare nella discussione delle prove, perché non tutti i robot sono uguali.

Tecnologia MAKO
La cosiddetta tecnologia MAKO è già in uso clinico dal 2006, inizialmente isolata per le protesi parziali di ginocchio [18]. In seguito, sono state aggiunte le applicazioni per le protesi totali dell’anca e, più recentemente, per le protesi totali del ginocchio nel 2016. Questo lo rende attualmente l’unico sistema in grado di coprire l’intera gamma del ginocchio e dell’anca e per il quale esiste un’esperienza clinica di oltre 10 anni. Nel 2018, i primi 2 di questi sistemi MAKO sono stati messi in funzione presso l’Hirslanden Bern in Svizzera e, ad oggi, sono già stati eseguiti oltre 1000 interventi con essi. Nel frattempo, ci sono altre 2 macchine in Svizzera.
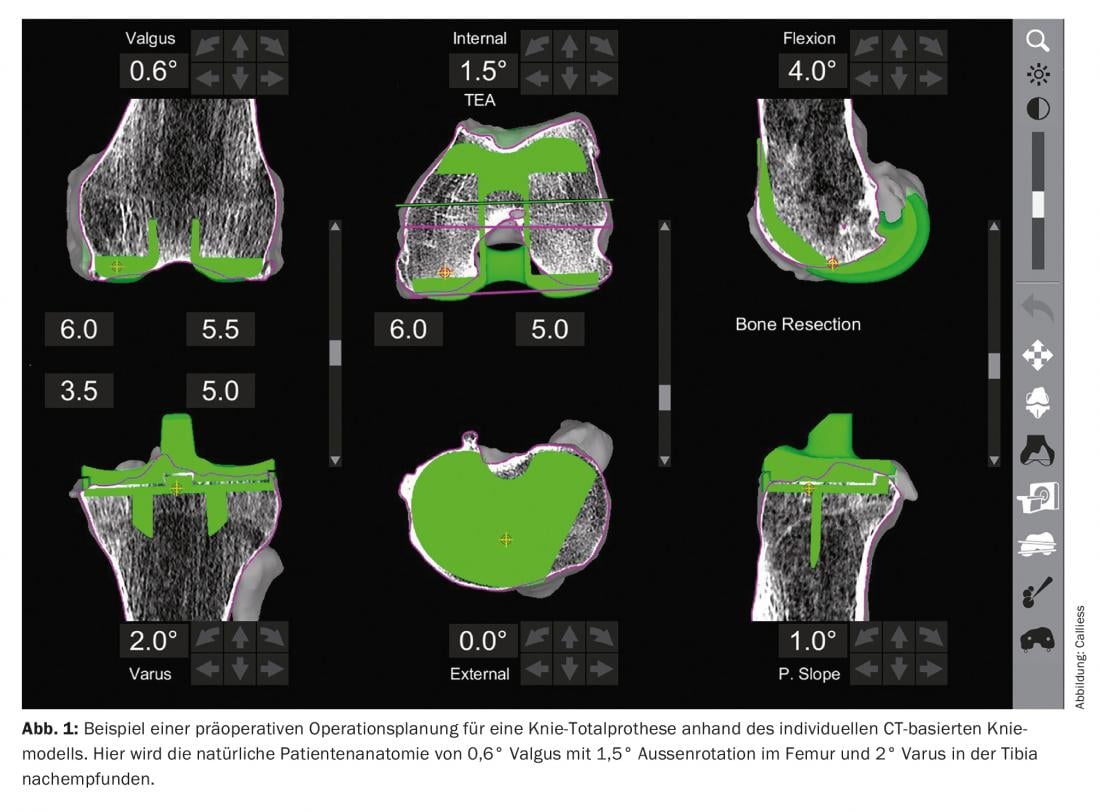
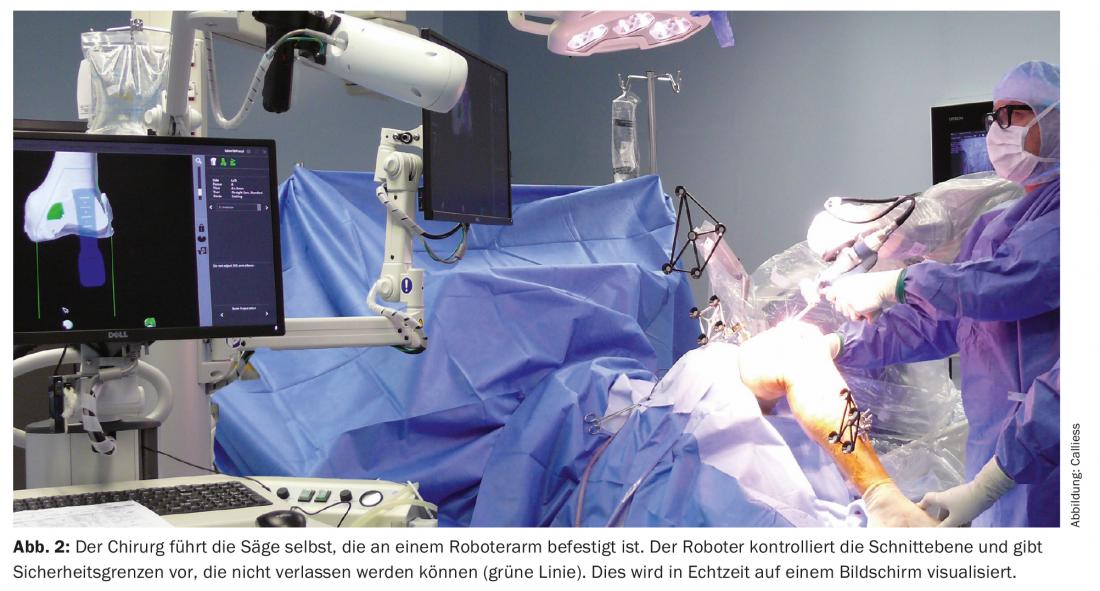
La particolarità di questa tecnologia è che si basa sui dati delle immagini del paziente (simile alla tecnologia PSI). Prima dell’intervento, viene eseguita una TAC dell’anca, del ginocchio e della caviglia, che viene segmentata in un modello osseo individuale. Grazie a questo, il chirurgo è in grado di creare un piano operatorio personalizzato per il paziente già in fase preoperatoria (Fig. 1) . Questo viene controllato e messo a punto intraoperatoriamente utilizzando parametri dinamici – la tensione dei legamenti, il profilo di movimento dell’articolazione del ginocchio. Dopo la determinazione virtuale dell’allineamento della protesi in calcestruzzo sulla base di queste informazioni, i tagli corrispondenti o la fresatura del letto implantare vengono eseguiti con il supporto del braccio robotico aptico. Lo strumento di lavoro è guidato dal chirurgo, il robot mantiene il livello corretto o stabilisce dei limiti per l’attivazione dello strumento, frenando o fermando lo strumento di lavoro (Fig. 2). Il chirurgo non può quindi uscire dal piano e i tessuti molli circostanti sono attivamente protetti. La pianificazione basata sulle immagini consente di visualizzare gli osteofiti e di controllare in modo oggettivo la posizione finale della protesi, come la stabilità dei legamenti. Rispetto al PSI, è possibile prendere in considerazione parametri aggiuntivi e ridurre gli outlier di allineamento grazie al supporto del robot.
NAVIO/CORI
Il secondo sistema robotico si chiama NAVIO o CORI nella seconda generazione [19]. È disponibile sul mercato europeo dal 2015 circa. Anche in questo caso, sono disponibili applicazioni per protesi parziali e totali sull’articolazione del ginocchio, mentre quelle dell’anca sono ancora in fase di sviluppo. Attualmente non ci sono macchine CORI in uso in Svizzera.
Tecnologicamente, a differenza del MAKO, si tratta di un sistema cosiddetto senza immagini, basato su modelli. Analogamente alla navigazione computerizzata di cui si è parlato, le coordinate ossee vengono determinate intraoperatoriamente e utilizzate per creare un modello osseo generico. La particolarità è che, oltre a questo modello, il chirurgo può anche toccare la superficie ossea reale intraoperatoriamente con una sonda. Questo crea una pseudo-TC sullo schermo, disponibile per la pianificazione personalizzata. Qui si possono registrare anche i parametri dinamici di movimento e stabilità, che possono essere incorporati nella pianificazione dell’intervento virtuale e nell’allineamento della protesi. La parte robotica consiste in un manipolo navigato con una testa di fresatura. Il letto della protesi viene fresato con questo. La testa di fresatura si ritrae non appena si lascia l’area di fresatura definita. In alternativa, si possono realizzare dei fori di posizionamento con la fresatrice, nei quali vengono poi inseriti i blocchi tagliati a sega convenzionali. In questo caso, il chirurgo applica una sega convenzionale guidata a mano attraverso il blocco di taglio posizionato, senza che questo sia guidato roboticamente.
OMNIBOT
Il sistema OMNIBot è una piattaforma di navigazione integrata da un’unità robotica passiva [20]. La prima applicazione clinica è stata effettuata nel 2007 e alcuni dispositivi sono in uso anche in Svizzera dal 2019. Attualmente, è disponibile solo un’applicazione per le protesi totali di ginocchio.
Il sistema OmniBot si basa esclusivamente sui principi descritti della navigazione informatica basata su modelli. Il taglio con sega tibiale viene eseguito in modo convenzionale (senza assistenza robotica). La particolarità è che, a differenza degli altri sistemi, viene introdotto un tensionatore dei legamenti controllato dalla pressione che, a differenza della determinazione soggettiva della stabilità legamentosa da parte del chirurgo, la determina in base a parametri oggettivi. Viene registrata una curva di stabilità sull’intero raggio di movimento. Questi dati vengono poi utilizzati per pianificare l’allineamento virtuale della protesi, fino a raggiungere la tensione ottimale del legamento con la protesi. Il sistema sta attualmente sviluppando degli ausili per il chirurgo. La realizzazione dei tagli a sega sul femore è assistita da una piccola unità robotica sull’osso del femore che regola una sagoma di taglio a sega convenzionale sul piano corretto. Il chirurgo utilizza quindi la sua abituale sega a mano, come nel sistema descritto sopra. Il focus di questo sistema è quindi meno sulla corretta riproduzione dell’anatomia ossea e più sulla tensione ottimizzata dei legamenti.
ROSA
Il più giovane rappresentante della chirurgia articolare robot-assistita è il sistema ROSA [21], che viene utilizzato in alcune cliniche in Svizzera dal 2021. Inoltre, attualmente può essere utilizzato solo per le protesi totali del ginocchio; le protesi parziali sono attualmente limitate a centri di sviluppo selezionati.
Tecnologicamente, ROSA, come i due precedenti, è un sistema di navigazione senza immagini e basato su modelli. Tuttavia, è possibile preselezionare il modello generico di ginocchio prima dell’intervento, sulla base di immagini radiografiche standardizzate, il che consente di pre-pianificare la posizione della protesi prima dell’intervento e dovrebbe anche ridurre la suscettibilità agli errori durante la registrazione del sistema di coordinate intraoperatorie.
Analogamente ai sistemi descritti in precedenza, è possibile leggere la stabilità del legamento intraoperatoriamente e incorporarla nella pianificazione virtuale dell’operazione. Quando si esegue l’operazione, si utilizza una dima di taglio, che viene posizionata sul piano corretto per mezzo di un braccio robotico. Il taglio della sega viene eseguito manualmente con una sega convenzionale, come descritto sopra.
Altri sistemi sono attualmente in fase di sviluppo, ognuno con le proprie caratteristiche specifiche. Tuttavia, non hanno ancora l’autorizzazione all’immissione in commercio per la Svizzera. Nel complesso, la robotica in Svizzera è ancora in una fase iniziale. Nel 2021, meno del 3% delle protesi di ginocchio primarie sono state impiantate con i sistemi robotici menzionati [2].
L’attuale base di prove
Aumenta la precisione e l’accuratezza
In base alla diversa durata della disponibilità clinica dei sistemi descritti, la situazione delle prove è molto eterogenea. Comune a tutti i sistemi è l’obiettivo di aumentare la precisione chirurgica ed evitare il posizionamento errato dell’impianto. Questo è facile da verificare metodicamente utilizzando le analisi dei risultati radiologici. Non sorprende che per tutte le tecnologie menzionate ci siano rapporti positivi corrispondenti che indicano che questo obiettivo primario sembra essere raggiunto in modo sicuro [19,20,22,23]. È stata dimostrata l’elevata precisione nel raggiungere la posizione desiderata della protesi e la riduzione delle deviazioni (outlier) nella posizione dell’asse della gamba rispetto all’impianto manuale. Non sono ancora state descritte differenze chiare tra i sistemi e le tecnologie.
Nel nostro lavoro comparativo, una volta abbiamo studiato la precisione per il corretto dimensionamento della protesi tra l’impianto convenzionale, manuale, il sistema MAKO a guida d’immagine e il sistema NAVIO senza immagini per le protesi parziali [24]. Entrambi i metodi robotizzati sono superiori alla tecnica manuale nei parametri clinicamente rilevanti. Un confronto diretto tra le tecnologie mostra un vantaggio per la tecnica MAKO basata sulla TAC. Quindi, sembra esserci un vantaggio nella pianificazione grazie all’anatomia ossea visibile preoperatoriamente; intraoperatoriamente le regioni difficili da vedere sono chiaramente visualizzate ed è possibile distinguere tra l’osso nativo e gli osteofiti formati. Inoltre, la fonte di errore “chirurgo” viene ridotta quando si registra il sistema di coordinate.
Riduzione delle complicazioni e delle revisioni
Sulla base dell’evidenza positiva dell’aumento della precisione chirurgica e della prevenzione degli errori, si pone di nuovo la domanda se questo porta anche (automaticamente) a una riduzione del tasso di revisione e delle complicanze?
L’anno scorso sono state pubblicate due recenti meta-analisi su questo aspetto del tasso di complicanze, che inizialmente non hanno riscontrato alcuna differenza nelle protesi di ginocchio robot-assistite rispetto a quelle manuali standard [25,26]. Tuttavia, va notato che è stata inclusa la letteratura del periodo 2007-2019, o 2019-2020, ossia pubblicazioni abbastanza precoci su ciascuna tecnologia, che potenzialmente includono la curva di apprendimento, se misurata rispetto all’esperienza clinica. Inoltre, la letteratura esamina invariabilmente il tasso di revisione precoce (di solito i primi 90 giorni!), che spesso non è legato principalmente a errori tecnici nel posizionamento della protesi – cioè infezioni, disturbi della guarigione della ferita o fratture.
Se si esamina il tasso di revisione dei parametri per le protesi di ginocchio robot-assistite rispetto agli impianti manuali, il Registro australiano delle protesi è particolarmente interessante da esaminare [11]. In Australia, la tecnica chirurgica utilizzata viene registrata in modo molto dettagliato (a differenza della maggior parte degli altri registri) e un buon 70% degli impianti di protesi di ginocchio viene effettuato con l’aiuto della tecnologia computerizzata e robotica. Il metodo robot-assistito ha già rappresentato il 16,6% delle sostituzioni totali del ginocchio nel 2021 e addirittura il 30% delle sostituzioni parziali.
Nei dati del registro del 2021, viene mostrato un vantaggio minimo per la robotica per le protesi totali di ginocchio per il tasso di revisione a 3 anni registrato finora, ma attualmente senza una chiara significatività statistica. In questo caso, resta da vedere il follow-up più lungo.
Nelle protesi parziali di ginocchio – di solito un’operazione in cui la precisione del posizionamento della protesi gioca un ruolo maggiore ed è più soggetta a errori – emerge un quadro interessante: Il rapporto annuale del registro delle protesi del 2019 ha mostrato un vantaggio altamente significativo della protesi parziale di ginocchio robot-assistita rispetto allo standard manuale dopo 3 anni. All’epoca, erano quasi esclusivamente il sistema MAKO ad essere rappresentato in questi dati e i grandi centri specializzati ad introdurre per primi la tecnica. Nell’attuale rapporto del 2021, questo effetto della riduzione del tasso di complicanze non è più significativo. Una possibile spiegazione è rappresentata dalle tecnologie molto diverse, che qui vengono riassunte con il termine “robot-assistito” e anche dai numerosi nuovi utenti, che forse influenzano i dati con la loro curva di apprendimento. Come prima, la protesi parziale utilizzata insieme alla tecnologia MAKO è quella con il tasso di revisione più basso nel Registro australiano. In SIRIS, solo la protesi parziale MAKO può essere identificata chiaramente [2]. Anche in questo caso, il tasso di revisione a 2 anni è significativamente inferiore alla media: 1,8% contro 4,6%. Se analizziamo nuovamente i dati delle meta-analisi e dei grandi centri specificamente per le protesi parziali di ginocchio, troviamo anche una differenza statisticamente significativa nel tasso di revisione per tecnologia robotica [27,28].
Curva di apprendimento e costi
Come appena accennato, è abbastanza plausibile che la curva di apprendimento dell’operatore abbia un’influenza sui parametri discussi. Attualmente, la letteratura valuta principalmente la curva di apprendimento in relazione al tempo di funzionamento. Qui si dimostra che il lavoro efficiente con il robot viene appreso rapidamente e che dopo pochi casi (7-20 a seconda dell’autore) si raggiunge un tempo di funzionamento riproducibile e solo leggermente prolungato [26,29]. Alcuni lavori possono anche dimostrare che è possibile un’ulteriore riduzione del tempo di intervento nel corso, fino a raggiungere la neutralità del flusso di lavoro pre-robotico dopo circa 100 casi. Tuttavia, questo richiede un numero elevato di casi e un’alta percentuale di adattamento della tecnologia.
In termini di precisione chirurgica – cioè l’esecuzione accurata dei tagli con la sega – non sembra esserci una curva di apprendimento significativa [30]. In uno studio abbiamo potuto dimostrare che anche un chirurgo meno esperto può realizzare un’elevata precisione di impianto grazie alla tecnica robotica [31]. Tuttavia, il tasso di complicanze era ancora maggiore in questi chirurghi inesperti rispetto ai dati presentati per i centri specializzati esperti in robot.
Questo mi porta a un punto di discussione essenziale della curva di apprendimento che è poco rappresentato nella letteratura: il corretto processo decisionale intraoperatorio. L’assistenza robotica aiuta chiaramente il chirurgo a migliorare l’esecuzione di un piano chirurgico, ma non la creazione e la messa a punto di questo piano (almeno secondo lo stato attuale dell’arte). Fornisce molti dati e informazioni aggiuntive sui parametri articolari e dinamici che devono essere registrati e interpretati dal chirurgo. Possono anche verificarsi degli errori e la protesi può non essere posizionata in modo ottimale anche in fase di pianificazione. A questo proposito, è necessario un alto livello di esperienza con i sistemi, nonché un apprendimento permanente basato sui parametri disponibili per migliorare e sviluppare ulteriormente gli algoritmi decisionali. Questa circostanza rappresenta un certo ostacolo per molti operatori nell’adattarsi alla nuova tecnologia. Un alto grado di specializzazione e di casistica con la robotica appare quindi indispensabile, nonostante il supporto tecnologico attivo.
Un secondo fattore in questo contesto riguarda i costi aggiuntivi delle tecnologie, che non si riflettono nell’attuale sistema di retribuzione e rendono più difficile l’uso diffuso della robotica. Secondo uno studio separato, i costi aggiuntivi ammontano a circa 1600-2500 CHF per procedura, a seconda della tecnologia utilizzata (senza immagini o con supporto TC) [32]. Esiste una dipendenza parziale dal numero di casi e anche dall’efficienza dei processi di lavoro del chirurgo e del reparto operatorio. La pianificazione e l’impostazione intraoperatoria pura sembrano più dispendiose in termini di tempo rispetto all’opzione di pianificazione preoperatoria.
Esito del paziente
Infine, uno dei fattori decisivi per valutare il valore aggiunto della robotica negli interventi alle articolazioni rimane il miglioramento dell’esito e della soddisfazione del paziente. Questo è l’unico modo per giustificare in ultima analisi i costi aggiuntivi, se l’effetto di riduzione dei costi attraverso la riduzione delle operazioni di revisione è attualmente piuttosto ridotto.
Esistono già alcuni dati buoni e affidabili sulle protesi parziali del ginocchio. Canetti e coautori descrivono un ritorno più rapido alla capacità sportiva dopo una protesi parziale robot-assistita [33]. Il gruppo di ricerca guidato da Marc Blyth è stato in grado di dimostrare, in uno studio prospettico, randomizzato e in doppio cieco, che le articolazioni del ginocchio robotizzate hanno mostrato una riabilitazione mediamente più rapida e meno dolore post-operatorio rispetto al gruppo di confronto operato in modo convenzionale [34]. Tuttavia, a 1 anno dall’intervento, non è stata rilevata alcuna differenza significativa. Questo effetto è stato descritto in altri studi. Nell’interpretazione, la riduzione del dolore postoperatorio è presumibilmente dovuta alla tecnica chirurgica più delicata sui tessuti molli, che si applica soprattutto alle frese a controllo robotico (MAKO, NAVIO).
Anche la situazione dei dati relativi alle protesi totali di ginocchio è piuttosto positiva. Una meta-analisi pubblicata di recente mostra un beneficio significativo per la funzione del ginocchio e l’esito riferito dal paziente in relazione alla sostituzione totale del ginocchio assistita da robot – Livello di evidenza: buono [26]. Analogamente alle esperienze descritte con il PSI, gli studi che si distinguono in particolare sono quelli che utilizzano la possibilità di una pianificazione virtuale tridimensionale in modo tale che la protesi venga impiantata in modo personalizzato per il paziente. Diversi autori chiariscono che il risultato è significativamente migliore se l’anatomia preartrosica può essere ricostruita con la protesi [35-37]. Seguire gli stessi concetti orientati alla meccanica e derivati dalla tecnica manuale non migliora l’esito del paziente.
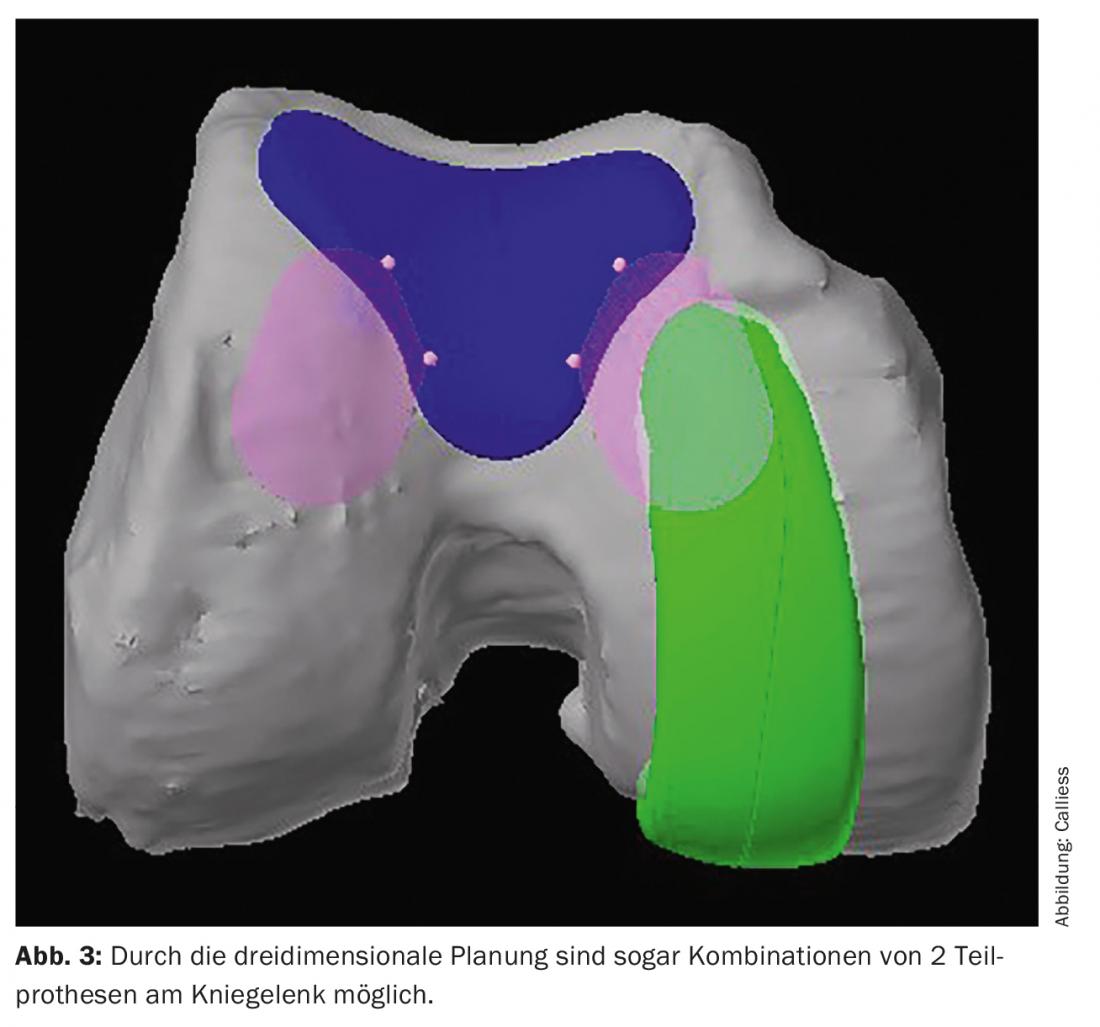
Un altro aspetto interessante per migliorare l’esito del paziente è l’uso più frequente di soluzioni protesiche parziali invece di protesi totali con l’aiuto della robotica. Oppure la combinazione di due protesi parziali con conservazione dei legamenti crociati, anziché una protesi totale con resezione dei legamenti crociati (Fig. 3). Come mostrato, uno dei principali contro-argomenti della protesi parziale – l’aumento del tasso di revisione – sembra essere ben affrontato dal supporto robotico. Dal momento che la protesi parziale è superiore alla protesi totale in termini di esito del paziente quando è indicata correttamente, l’aumento della percentuale di protesi parziali rappresenta già un miglioramento dell’esito del paziente. Ad esempio, oggi eseguiamo circa il 45% dei nostri impianti di protesi di ginocchio come protesi parziali, contrariamente alla media svizzera che attualmente è di circa il 17% [2].
Valore aggiunto o marketing?
Se ora torniamo brevemente alla domanda iniziale, formulata in modo un po’ pubblicitario, si può riassumere che nell’area delle protesi parziali di ginocchio, è stato dimostrato un reale valore aggiunto grazie al supporto robotico. Sebbene l’esito per il paziente di una protesi parziale robot-assistita a medio termine non sia necessariamente migliore di una protesi operata convenzionalmente, la riabilitazione è più breve e il rischio di revisione è significativamente ridotto. Se si impiantano più protesi parziali invece di protesi totali attraverso l’uso di robot, il sistema sanitario ne trarrà vantaggio anche da un punto di vista economico generale: le protesi parziali hanno relativamente meno complicazioni, una qualità di vita più elevata e costi di trattamento complessivamente inferiori. I costi aggiuntivi dovuti all’uso dei robot sono assorbiti da questi effetti.
Nel caso delle protesi totali di ginocchio, il valore aggiunto scientificamente confermato in termini di riabilitazione e rischio di revisione è ancora meno chiaramente dimostrato. Tuttavia, la robotica mostra il valore aggiunto che l’anatomia naturale del paziente può essere presa in considerazione meglio e che è possibile un’individualizzazione della terapia basata su parametri decisionali oggettivi. È stato dimostrato che questo ha il potenziale di migliorare la qualità dell’assistenza e i risultati. Tuttavia, se si applicano gli stessi principi chirurgici delle protesi di ginocchio convenzionali, il valore aggiunto è basso.
Messaggi da portare a casa
- In Svizzera, solo il 3% circa delle protesi di ginocchio ha attualmente un supporto robotico.
- L’assistenza robotica guidata da immagini porta a una riduzione significativa del tasso di revisione delle emiprotesi di ginocchio (1,8% vs. 4,6% dopo 2 anni).
- Per le protesi totali di ginocchio, è possibile un adattamento/allineamento personalizzato della protesi con elevata precisione. Questo migliora l’esito del paziente.
- Svantaggi attuali: costi operativi elevati e curva di apprendimento per il singolo operatore.
Letteratura:
- Rodriguez-Merchan EC: Soddisfazione del paziente dopo l’artroplastica totale primaria del ginocchio: fattori che contribuiscono. Arch Bone Jt Surg 2021; 9 (4): 379-386; doi: 10.22038/abjs.2020.46395.2274.
- Rapporto annuale del Registro nazionale svizzero delle articolazioni, anca e ginocchio 2012-2021. https://swiss-medtech.ch/news/siris-report-2021
- Beckmann J, Meier MK, Benignus C, et al: Artroplastica del ginocchio contemporanea: una soluzione unica o tempo per la diversità? Arch Orthop Trauma Surg 2021; 141 (12): 2185-2194; doi: 10.1007/s00402-021-04042-4.
- Riviere C, Lazic S, Boughton O, et al: Concetti attuali per l’allineamento delle protesi di ginocchio: specifici per il paziente o sistematici? EFORT Open Rev 2018; 3 (1): 1-6; doi: 10.1302/2058-5241.3.170021.
- Riviere C, Iranpour F, Auvinet E, et al: Opzioni di allineamento per l’artroplastica totale del ginocchio: una revisione sistematica. Orthop Traumatol Surg Res 2017; 103 (7): 1047-1056; doi: 10.1016/j.otsr.2017.07.010.
- Ettinger M, Tucking LR, Savov P: [Kinematic alignment in total knee arthroplasty with image-based and image-independent robotic support]. Ortopedia 2020; 49(7): 604-610; doi: 10.1007/s00132-020-03924-6.
- Urish KL, Conditt M, Roche M, Rubash HE: Artroplastica totale del ginocchio robotica: assistente chirurgico per un ginocchio personalizzato a cinematica normale. Ortopedia 2016; 39(5): e822-827; doi: 10.3928/01477447-20160623-13.
- Cheng T, Zhao S, Peng X, Zhang X: La chirurgia assistita dal computer migliora l’allineamento post-operatorio della gamba e il posizionamento dell’impianto dopo l’artroplastica totale del ginocchio? Una meta-analisi di studi controllati randomizzati? Chirurgia del ginocchio, traumatologia sportiva, artroscopia: rivista ufficiale dell’ESSKA 2012; 20(7): 1307-1322; doi: 10.1007/s00167-011-1588-8.
- Fu Y, Wang M, Liu Y, Fu Q: Risultati dell’allineamento nell’artroplastica totale del ginocchio con navigazione: una meta-analisi. Chirurgia del ginocchio, traumatologia sportiva, artroscopia: rivista ufficiale dell’ESSKA 2012; 20 (6): 1075-1082; doi: 10.1007/s00167-011-1695–1696.
- Baier C, Wolfsteiner J, Otto F, et al: Risultati clinici, radiologici e di sopravvivenza dopo dieci anni di confronto tra l’artroplastica totale del ginocchio con navigazione e quella convenzionale: un’analisi a coppie. Ortopedia internazionale 2017; 41(10): 2037-2044; doi: 10.1007/s00264-017-3509-z.
- Relazione annuale 2021 dell’Associazione Ortopedica Australiana sul Registro Nazionale delle Protesi Articolari. https://aoanjrr.sahmri.com/annual-reports-2021.
- Lee DY, Park YJ, Hwang SC, et al: Nessuna differenza negli esiti a medio e lungo termine della navigazione assistita da computer rispetto all’artroplastica totale del ginocchio convenzionale. Chirurgia del ginocchio, traumatologia dello sport, artroscopia: rivista ufficiale dell’ESSKA 2020; 28(10): 3183-3192; doi: 10.1007/s00167-019-05808-5.
- Calliess T, Ettinger M, Stukenborg-Colsmann C, Windhagen H: [Allineamento cinematico su misura nell’artroplastica totale del ginocchio con PSI. La storia della tecnologia ShapeMatch]. Ortopedia 2016; 45 (4): 314-321; doi: 10.1007/s00132-016-3240-2.
- Thienpont E, Schwab PE, Fennema P: Efficacia degli strumenti specifici per il paziente nell’artroplastica totale del ginocchio: revisione sistematica e meta-analisi. The Journal of bone and joint surgery American 2017; 99 (6): 521-530; doi: 10.2106/JBJS.16.00496.
- Woon JTK, Zeng ISL, Calliess T, et al: Esito dell’allineamento cinematico con strumentazione specifica per il paziente rispetto all’allineamento meccanico nella TKA: una meta-analisi e un’analisi di sottogruppo di studi randomizzati. Arch Orthop Trauma Surg 2018; 138(9): 1293-1303; doi: 10.1007/s00402-018-2988-8.
- Calliess T, Bauer K, Stukenborg-Colsman C, et al: Allineamento cinematico PSI rispetto all’allineamento meccanico non PSI nell’artroplastica totale del ginocchio: uno studio prospettico e randomizzato. Chirurgia del ginocchio, traumatologia sportiva, artroscopia : rivista ufficiale dell’ESSKA 2017; 25(6): 1743-1748; doi: 10.1007/s00167-016-4136-8.
- Fucentese SF, Koch PP: Un nuovo sistema di guida chirurgica basato sulla realtà aumentata per l’artroplastica totale del ginocchio. Arch Orthop Trauma Surg 2021; 141(12): 2227-2233; doi: 10.1007/s00402-021-04204-4.
- Roche M: Il sistema di artroplastica del ginocchio con braccio robotico MAKO. Arch Orthop Trauma Surg 2021; 141(12): 2043-2047; doi: 10.1007/s00402-021-04208-0.
- Sicat CS, Chow JC, Kaper B, et al: Accuratezza del posizionamento dei componenti in due generazioni di artroplastica di ginocchio assistita da robot manuale. Arch Orthop Trauma Surg 2021; 141(12): 2059-2067; doi: 10.1007/s00402-021-04040-6.
- Shatrov J, Murphy GT, Duong J, Fritsch B: Artroplastica totale di ginocchio assistita da robot con la piattaforma OMNIBot: una revisione dei principi di utilizzo e dei risultati. Arch Orthop Trauma Surg 2021; 141(12): 2087-2096; doi: 10.1007/s00402-021-04173-8.
- Batailler C, Hannouche D, Benazzo F, Parratte S: Concetti e tecniche di una nuova tecnica roboticamente assistita per l’artroplastica totale del ginocchio: il sistema di ginocchio ROSA. Arch Orthop Trauma Surg 2021; 141(12): 2049-2058; doi: 10.1007/s00402-021-04048-y.
- Parratte S, Price AJ, Jeys LM, et al: Accuratezza di una nuova tecnica robotica per l’artroplastica totale del ginocchio: uno studio su cadavere. J Arthroplasty 2019; 34(11): 2799-2803; doi: 10.1016/j.arth.2019.06.040.
- Batailler C, Fernandez A, Swan J, et al: Il sistema robotico a braccio assistito MAKO CT è una procedura affidabile per l’artroplastica totale del ginocchio: una revisione sistematica. Knee Surg Sports Traumatol Arthrosc 2021; 29(11): 3585-3598; doi: 10.1007/s00167-020-06283-z.
- Batailler C, Bordes M, Lording T, et al: Miglioramento del dimensionamento con il sistema robot-assistito basato sulle immagini rispetto alle tecniche senza immagini e convenzionali nell’artroplastica unicompartimentale mediale del ginocchio. Bone Joint J 2021; 103-B(4): 610-618; doi: 10.1302/0301-620X.103B4.BJJ-2020-1453.R1.
- Chin BZ, Tan SSH, Chua KCX, et al: Artroplastica del ginocchio totale e unicompartimentale assistita da robot rispetto a quella convenzionale: una meta-analisi dei risultati radiologici e funzionali. J Knee Surg 2021; 34(10): 1064-1075; doi: 10.1055/s-0040-1701440.
- Zhang J, Ndou WS, Ng N, et al: L’artroplastica totale del ginocchio assistita da braccio robotico è associata a una migliore precisione e a esiti riferiti dal paziente: una revisione sistematica e una meta-analisi. Chirurgia del ginocchio Sport Traumatol Arthrosc 2021; doi: 10.1007/s00167-021-06464-4.
- Batailler C, White N, Ranaldi FM, et al: Migliore posizione dell’impianto e minore tasso di revisione con l’artroplastica unicompartimentale del ginocchio assistita da robot. Knee Surg Sports Traumatol Arthrosc 2019; 27(4): 1232-1240; doi: 10.1007/s00167-018-5081-5.
- Sun Y, Liu W, Hou J, et al: L’artroplastica unicompartimentale del ginocchio assistita da robot ha tassi di complicanze e revisioni inferiori rispetto alla procedura convenzionale? Una revisione sistematica e una meta-analisi. BMJ Open 2021; 11(8): e044778; doi: 10.1136/bmjopen-2020-044778.
- Chen Z, Bhowmik-Stoker M, Palmer M, et al: Curva di apprendimento basata sul tempo per l’artroplastica totale del ginocchio assistita da robot: uno studio multicentrico. J Knee Surg 2022; doi: 10.1055/s-0042-1744193.
- Vermue H, Luyckx T, Winnock de Grave P, et al: L’artroplastica totale di ginocchio robot-assistita è associata a una curva di apprendimento per il tempo chirurgico, ma non per l’allineamento dei componenti, l’allineamento dell’arto e il bilanciamento del gap. Knee Surg Sports Traumatol Arthrosc 2022; 30(2): 593-602; doi: 10.1007/s00167-020-06341-6.
- Savov P, Tuecking LR, Windhagen H et al: La robotica migliora l’accuratezza dell’allineamento e riduce i tassi di revisione precoce per l’UKA nelle mani di chirurghi UKA a basso volume. Arch Orthop Trauma Surg 2021; 141(12): 2139-2146; doi: 10.1007/s00402-021-04114-5.
- Christen B, Tanner L, Ettinger M, et al: Analisi comparativa dei costi di quattro diverse tecnologie assistite da computer per impiantare un’artroplastica totale del ginocchio rispetto alla strumentazione convenzionale. J Pers Med 2022; 12(2); doi: 10.3390/jpm12020184.
- Canetti R, Batailler C, Bankhead C, et al: Ritorno allo sport più rapido dopo l’artroplastica unicompartimentale laterale del ginocchio assistita da robot: uno studio comparativo. Arch Orthop Trauma Surg 2018; 138 (12): 1765-1771; doi: 10.1007/s00402-018-3042-6.
- Gilmour A, MacLean AD, Rowe PJ, et al: Artroplastica del ginocchio unicompartimentale assistita da braccio robotico vs. convenzionale. I risultati clinici a 2 anni di uno studio controllato randomizzato. J Arthroplasty 2018; 33 (7S): S109-S115; doi: 10.1016/j.arth.2018.02.050.
- Huber K, Christen B, Calliess S, Calliess T: Il vero allineamento cinematico è applicabile nel 44% dei pazienti che applicano criteri di indicazione restrittivi – un’analisi retrospettiva di 111 TKA con assistenza robotica. J Pers Med 2021; 11 (7); doi: 10.3390/jpm11070662.
- Winnock de Grave P, Luyckx T, Claeys K, et al: Maggiore soddisfazione dopo l’artroplastica totale del ginocchio utilizzando un allineamento cinematico inverso ristretto rispetto all’allineamento meccanico regolato. Knee Surg Sports Traumatol Arthrosc 2022; 30 (2): 488-499; doi: 10.1007/s00167-020-06165-4.
- Elbuluk AM, Jerabek SA, Suhardi VJ, et al: Confronto testa a testa tra allineamento cinematico e allineamento meccanico per l’artroplastica totale del ginocchio. J Arthroplasty 2022; doi: 10.1016/j.arth.2022.01.052.
PRATICA GP 2022; 18(4): 6-13