La implantación de prótesis de rodilla y cadera es una de las operaciones más frecuentes en Suiza, con unas 40.000 intervenciones al año. A pesar de la metodología establecida, los estudios demuestran que hasta un 20% de los pacientes no están satisfechos con el resultado obtenido tras la implantación de una prótesis total de rodilla. El riesgo de revisión de una prótesis de rodilla es de aproximadamente un 6% en los primeros 5 años. Alrededor del 60% de estas revisiones se deben a errores quirúrgicos. Por tanto, sigue siendo necesario mejorar la precisión quirúrgica y minimizar los errores quirúrgicos.
La implantación de prótesis de rodilla y cadera es una de las operaciones más frecuentes en Suiza, con unas 40.000 intervenciones al año. A pesar de la metodología establecida, los estudios demuestran que hasta un 20% de los pacientes no están satisfechos con el resultado obtenido tras la implantación de una prótesis total de rodilla [1]. Según el Registro Suizo de Prótesis, en el que se registran obligatoriamente todos los implantes de prótesis de rodilla y cadera, el riesgo de revisión de una prótesis de rodilla es de aproximadamente un 6% en los primeros 5 años [2]. Si se echa un vistazo crítico a las razones de estas revisiones, se puede formular que alrededor del 60% de estas revisiones se producen debido a errores quirúrgicos. La colocación incorrecta de los componentes protésicos y las inestabilidades articulares son, en conjunto, responsables de una proporción significativa de las revisiones. Los pacientes afectados suelen pasar un largo periodo de sufrimiento y el sistema sanitario soporta costes importantes debido a los tratamientos adicionales, las operaciones y, posiblemente, la incapacidad laboral. Por tanto, sigue siendo necesario mejorar la precisión quirúrgica y minimizar los errores quirúrgicos.
En una gran proporción de los pacientes insatisfechos restantes, la prótesis de rodilla se implanta correctamente según los aspectos técnicos actualmente válidos y, sin embargo, el paciente refiere limitaciones en la función y la resistencia de la rodilla. En este contexto, recientemente ha surgido un gran debate en la literatura especializada sobre el objetivo correcto para la colocación de la prótesis. Numerosos autores proclaman una necesaria individualización de la terapia y la alineación de las prótesis basándose en la gran variabilidad de la anatomía de los pacientes [3–5]. Sin embargo, los métodos quirúrgicos manuales establecidos tienen como objetivo una alineación mecánica estandarizada y sistemática de la prótesis, por lo que una individualización reproducible sólo es posible hasta cierto punto. En consecuencia, muchos autores ven la necesidad de un apoyo técnico al cirujano para poder aplicar nuevos conceptos en las prótesis de rodilla y reducir así el elevado número de pacientes insatisfechos mencionado [6,7].
Avances anteriores en la asistencia informática para la cirugía de prótesis articular
Ya a finales de la década de 1990 se introdujo la llamada navegación por ordenador para aumentar la precisión de la implantación y evitar el posicionamiento incorrecto de las prótesis de rodilla y cadera. Los sistemas establecidos hoy en día se basan en la navegación pasiva, sin imágenes. Durante la operación, el cirujano explora puntos de referencia anatómicos especiales con una sonda de infrarrojos. A continuación, se proyecta en estas coordenadas un modelo genérico de articulación procedente de una base de datos almacenada, que está disponible para medir el ángulo y determinar el tamaño de la prótesis. Durante la operación, el cirujano obtiene una visualización en tiempo real de la alineación de su corte de sierra y del implante en la pantalla del ordenador. Por lo tanto, tiene un control pasivo de sus acciones.
Según los datos actuales, esta técnica es muy adecuada para aumentar la precisión de la implantación. Diversos metaanálisis muestran que hay menos desviaciones del objetivo de alineación fijado en casi todos los niveles [8,9]. Que esto, a su vez, conduzca ya a una reducción de la tasa de revisión no está tan claramente demostrado. Este efecto está ciertamente descrito en los grandes centros [10], pero en los registros de prótesis sólo es visible en análisis especiales de subgrupos de, por ejemplo, pacientes muy jóvenes [11]. Sin embargo, no puede demostrarse ningún efecto con respecto a los resultados y la satisfacción de los pacientes [12]. Una de las posibles explicaciones de esta situación de los datos es la continua falta de individualización de la terapia mediante el uso de modelos estándar, que sólo pueden representar de forma limitada las condiciones anatómicas específicas. Hoy en día, en Suiza, alrededor del 10% de las prótesis de rodilla se implantan con ayuda de la navegación.
El siguiente paso en el soporte técnico quirúrgico lo representan las plantillas de corte de sierra específicas para cada paciente (PSI), que se utilizaron por primera vez en prótesis de rodilla alrededor de 2006 [13]. Con esta tecnología, se realizan imágenes por resonancia magnética o tomografía computarizada antes de la intervención y se segmentan para crear un modelo de rodilla personalizado del paciente. La planificación individual de las operaciones puede realizarse entonces en el ordenador. Para trasladar esta planificación al quirófano, se calculan y fabrican plantillas individuales de corte de sierra (impresión en 3D), que pueden colocarse intraoperatoriamente en la articulación de la rodilla. Usted determina la posición de la prótesis.
Según los datos actuales, también se ha descrito para esta técnica una reducción de los valores atípicos de alineación en comparación con la implantación manual [14]. Sin embargo, las PSI son especialmente interesantes por la posibilidad de individualizar la posición de la prótesis en función de la anatomía del paciente. Algunos estudios y metaanálisis demuestran que esta atención personalizada puede mejorar los resultados de los pacientes [15,16]. Sin embargo, también hay informes en las publicaciones sobre una mayor susceptibilidad al error de las plantillas y a veces grandes desviaciones de la posición de la prótesis respecto a la planificación preoperatoria en pacientes individuales [14,13]. También se critica que en la planificación informática sólo puedan utilizarse datos de imágenes anatómicas y que no se tengan en cuenta parámetros dinámicos como la tensión de los tejidos blandos. Estas limitaciones, así como la planificación que requiere mucho tiempo, aún no han hecho que la tecnología se generalice. Actualmente, alrededor del 15% de las prótesis de rodilla se implantan con ayuda de la ISP en Suiza. En la actualidad, la técnica PSI se está perfeccionando con una combinación de gafas de realidad aumentada para hacer visible la planificación informática intraoperatoria y evitar errores de alineación. Sin embargo, actualmente no existen datos al respecto, sino informes iniciales de viabilidad [17].
Sistemas robóticos para operaciones de prótesis articulares
Las primeras aproximaciones a la cirugía asistida por robot en prótesis articulares se remontan a finales de los años noventa. El “RoboDoc” presentado entonces era un sistema de fresado totalmente automático que preparaba el hueso del fémur para la implantación de una prótesis de cadera. Tecnológicamente, se trataba de un robot industrial poco modificado que dependía de que el objeto -el hueso- no se moviera durante el proceso de fresado. Había que arreglarlo en consecuencia. Esto ha causado numerosos problemas y también complicaciones específicas, por lo que la tecnología ha sido completamente abandonada en Europa (incluso después de muchas relaciones públicas negativas).
Desde entonces, las tecnologías robóticas se han desarrollado enormemente. Los sistemas modernos, por ejemplo, pueden ahora reaccionar a influencias externas -por ejemplo, el cirujano- y adaptar dinámicamente su plan de operaciones en tiempo real en tres dimensiones en el espacio. Por tanto, ahora el hueso puede moverse durante el proceso de fresado o aserrado y la herramienta robótica ya no es necesariamente guiada de forma autónoma por el robot, sino que puede ser guiada por el cirujano (la denominada tecnología háptica). Por lo tanto, el robot apoya al cirujano comprobando el plano de aserrado correcto y, en caso necesario, frenando al cirujano si se sale del plan quirúrgico. A diferencia de la navegación por ordenador comentada, ahora se trata de una herramienta activa que no sólo proporciona datos sobre la alineación de la prótesis, sino que también apoya de forma más o menos activa la aplicación del plan quirúrgico.
Lo que constituye específicamente un robot quirúrgico no se define con más detalle, salvo la característica de apoyar activamente uno o más pasos de trabajo. Hasta la fecha, se han aprobado en Suiza cuatro sistemas de asistencia para prótesis articulares, que se describen a sí mismos como “asistencia quirúrgica robótica” (Tab. 1) . Sin embargo, difieren considerablemente en sus detalles tecnológicos, manejo y posibilidades. En consecuencia, es fundamental considerar la cirugía robótica como algo uniforme, ¡también en lo que respecta a los datos clínicos, sus ventajas y su valor añadido! A continuación, hablaremos primero brevemente de las principales diferencias entre las tecnologías para poder valorarlo en la discusión de las pruebas, porque no todos los robots son iguales.

Tecnología MAKO
La denominada tecnología MAKO ya se utiliza clínicamente desde 2006, aislada inicialmente para prótesis parciales de rodilla [18]. Más tarde, se añadieron aplicaciones para prótesis totales de cadera y, más recientemente, prótesis totales de rodilla en 2016. Esto lo convierte actualmente en el único sistema que puede cubrir todo el rango de la rodilla y la cadera y para el que existe una experiencia clínica de más de 10 años. En 2018, se pusieron en funcionamiento los 2 primeros de estos sistemas MAKO en Hirslanden Bern (Suiza) y, hasta la fecha, ya se han realizado más de 1.000 procedimientos con ellos. Mientras tanto, hay 2 máquinas más en Suiza.
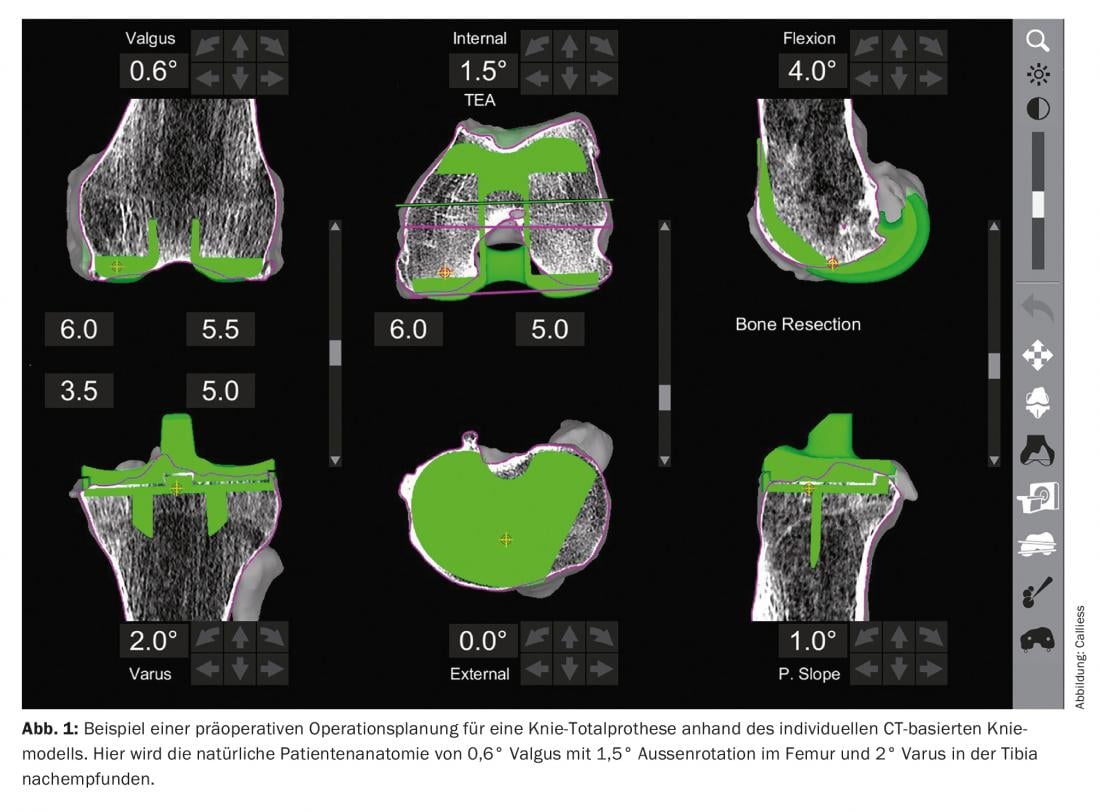
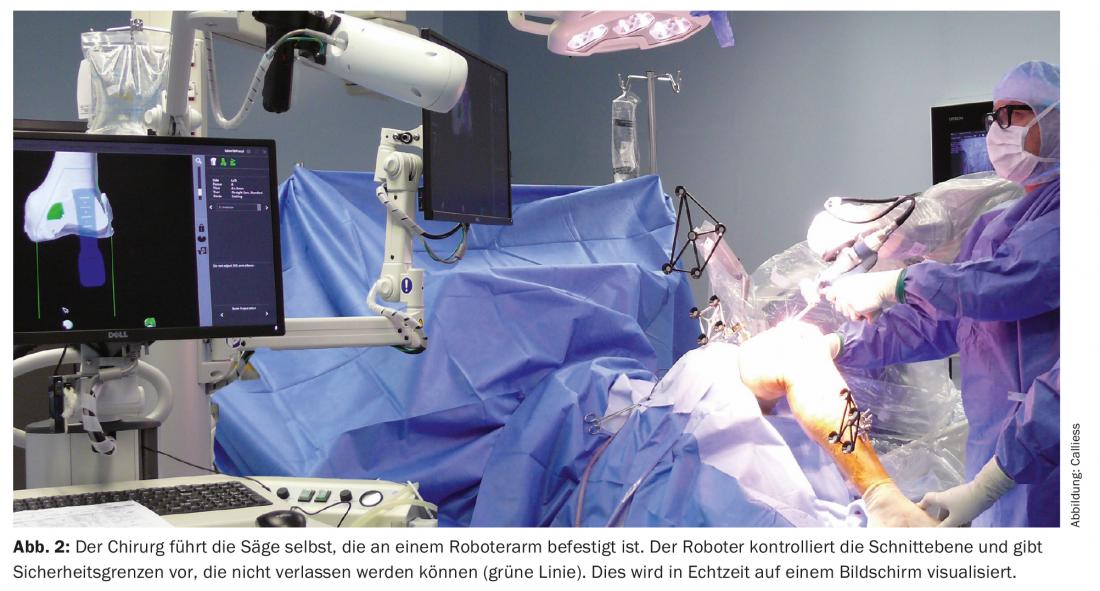
Lo especial de esta tecnología es que se basa en datos de imagen del paciente (similar a la tecnología PSI). Preoperatoriamente, se realiza un TAC de la cadera, la rodilla y el tobillo y se segmenta en un modelo óseo individual. De este modo, el cirujano puede crear un plan de intervención individualizado para el paciente ya antes de la operación (Fig. 1) . Esto se comprueba y se ajusta intraoperatoriamente mediante parámetros dinámicos: la tensión del ligamento, el perfil de movimiento de la articulación de la rodilla. Tras determinar virtualmente la alineación concreta de la prótesis basándose en esta información, se llevan a cabo los correspondientes cortes de sierra o fresado del lecho del implante con el apoyo del brazo robótico háptico. La herramienta de trabajo es guiada por el cirujano, el robot mantiene el nivel correcto o establece límites para la activación de la herramienta frenando o deteniendo la herramienta de trabajo (Fig. 2). De este modo, el cirujano no puede salirse del plano y los tejidos blandos circundantes quedan activamente protegidos. La planificación basada en imágenes permite visualizar los osteofitos y comprobar objetivamente la posición final de la prótesis, como la estabilidad de los ligamentos. En comparación con la ISP, pueden tenerse en cuenta parámetros adicionales y reducirse los valores atípicos de alineación mediante el apoyo de robots.
NAVIO/CORI
El segundo sistema robotizado se denomina NAVIO o CORI en la 2ª generación [19]. Está disponible en el mercado europeo desde aproximadamente 2015. También en este caso se dispone de aplicaciones para prótesis parciales y totales en la articulación de la rodilla, mientras que las aplicaciones para la cadera aún están en fase de desarrollo. Actualmente no hay máquinas CORI en uso en Suiza.
Tecnológicamente, a diferencia del MAKO, se trata de un sistema denominado sin imágenes y basado en modelos. De forma análoga a la navegación por ordenador comentada, se determinan intraoperatoriamente las coordenadas óseas, que se utilizan para crear un modelo óseo genérico. La particularidad es que, además de este modelo, el cirujano puede puntear intraoperatoriamente la superficie ósea real con una sonda. Esto crea un pseudo-TAC en la pantalla que está disponible para la planificación individualizada. Aquí también pueden registrarse parámetros dinámicos de movimiento y estabilidad, que pueden incorporarse a la planificación de la cirugía virtual y a la alineación de la prótesis. La parte robotizada consta de una pieza de mano navegable con un cabezal de fresado. Con esto se fresa el lecho de la dentadura. El cabezal de fresado se retrae en cuanto abandona la zona de fresado definida. Como alternativa, se pueden realizar orificios de posicionamiento con la fresadora, en los que luego se insertan bloques convencionales cortados con sierra. En este caso, el cirujano aplica una sierra convencional guiada a mano a través del bloque de corte posicionado sin que éste sea guiado robóticamente.
OMNIBOT
El sistema OMNIBot es una plataforma de navegación complementada con una unidad robótica pasiva [20]. La primera aplicación clínica se llevó a cabo en 2007, y algunos dispositivos también se utilizan en Suiza desde 2019. En la actualidad, sólo se dispone de una aplicación para prótesis totales de rodilla.
El sistema OmniBot se basa exclusivamente en los principios descritos de navegación por ordenador basada en modelos. El corte con sierra de la tibia se realiza de forma convencional (sin asistencia robótica). La particularidad reside en que, a diferencia de los demás sistemas, se introduce un tensor de ligamentos controlado por presión que, a diferencia de la determinación subjetiva de la estabilidad ligamentaria por parte del cirujano, la determina en función de parámetros objetivos. Se registra una curva de estabilidad en todo el radio de movimiento. A continuación, estos datos se utilizan para planificar la alineación virtual de la prótesis hasta conseguir una tensión óptima del ligamento con la prótesis. El sistema está desarrollando actualmente ayudas para el cirujano. La realización de los cortes de sierra en el fémur está asistida por una pequeña unidad robótica en el hueso femoral que ajusta una plantilla de corte de sierra convencional al plano correcto. Por lo tanto, el cirujano utiliza su sierra de mano habitual del mismo modo que en el sistema descrito anteriormente. Por lo tanto, este sistema se centra menos en la reproducción correcta de la anatomía ósea y más en la tensión optimizada de los ligamentos.
ROSA
El representante más joven de la cirugía articular asistida por robot es el sistema ROSA [21], que se utiliza en algunas clínicas de Suiza desde 2021. Además, actualmente sólo puede utilizarse para prótesis totales de rodilla; las prótesis parciales están limitadas a determinados centros de desarrollo.
Tecnológicamente, ROSA, como los dos anteriores, es un sistema de navegación sin imágenes y basado en modelos. Sin embargo, es posible preseleccionar el modelo genérico de rodilla antes de la operación basándose en imágenes de rayos X normalizadas, lo que permite planificar previamente la posición de la prótesis antes de la operación y también debería reducir la susceptibilidad a los errores al registrar el sistema de coordenadas intraoperatorio.
De forma análoga a los sistemas descritos anteriormente, es posible leer la estabilidad del ligamento intraoperatoriamente e incorporarla a la planificación virtual de la operación. Al realizar la operación, se utiliza una plantilla de aserrado que se coloca en el plano correcto mediante un brazo robotizado. El corte de sierra propiamente dicho se realiza manualmente con una sierra convencional como se ha descrito anteriormente.
Actualmente se están desarrollando otros sistemas, cada uno con sus propias características específicas. Sin embargo, aún no disponen de autorización de comercialización en Suiza. En general, la robótica en Suiza se encuentra todavía en una fase incipiente. En 2021, menos del 3% de las prótesis primarias de rodilla se implantaron con los sistemas robóticos mencionados [2].
Base actual de pruebas
Aumente la precisión y la exactitud
De acuerdo con las diferentes duraciones de la disponibilidad clínica de los sistemas descritos, la situación de las pruebas es muy heterogénea. Todos los sistemas tienen en común el objetivo de aumentar la precisión quirúrgica y evitar la mala colocación de los implantes. Esto es fácil de verificar metódicamente mediante análisis de resultados radiológicos. Como era de esperar, existen informes positivos correspondientes para todas las tecnologías mencionadas que indican que este objetivo principal parece alcanzarse con seguridad [19,20,22,23]. Se ha demostrado una gran precisión a la hora de lograr la posición deseada de la prótesis y una reducción de las desviaciones (valores atípicos) en la posición del eje de la pierna en comparación con la implantación manual. Aún no se han descrito diferencias claras entre los sistemas y las tecnologías.
En nuestro propio trabajo comparativo, investigamos una vez la precisión para el correcto dimensionamiento de la prótesis entre la implantación convencional, manual, el sistema MAKO guiado por imagen y el sistema NAVIO sin imagen para prótesis parciales [24]. Ambos métodos asistidos por robot son superiores a la técnica manual en parámetros clínicamente relevantes. Una comparación directa de las tecnologías muestra un beneficio para la técnica MAKO basada en la TC. Por lo tanto, parece haber una ventaja en la planificación debido a la anatomía ósea visible preoperatoriamente; intraoperatoriamente las regiones difíciles de ver se visualizan con claridad y es posible distinguir entre el hueso nativo y los osteofitos formados. Además, se reduce la fuente de error “cirujano” al registrar el sistema de coordenadas.
Reducción de complicaciones y revisiones
Basándose en las pruebas positivas de una mayor precisión quirúrgica y prevención de errores, vuelve a surgir la pregunta de si esto también conlleva (automáticamente) una reducción de la tasa de revisiones y complicaciones.
El año pasado se publicaron dos metaanálisis recientes sobre este aspecto de la tasa de complicaciones, que inicialmente no encontraron diferencias en las prótesis de rodilla asistidas por robot en comparación con el estándar manual [25,26]. Sin embargo, hay que tener en cuenta que se incluyó bibliografía de 2007 a 2019, o de 2019 a 2020, es decir, publicaciones bastante tempranas sobre cada tecnología, lo que podría incluir la curva de aprendizaje, si se compara con la experiencia clínica. Además, la bibliografía se fija invariablemente en la tasa de revisiones tempranas (¡normalmente los primeros 90 días!), que a menudo no están relacionadas principalmente con errores técnicos en la colocación de la prótesis, es decir, infecciones, trastornos en la cicatrización de heridas o fracturas.
Si nos fijamos en la tasa de revisión de parámetros de las prótesis de rodilla asistidas por robot en comparación con las implantaciones manuales, el Registro Australiano de Prótesis resulta especialmente interesante para echar un vistazo a [11]. En Australia, la técnica quirúrgica utilizada se registra con gran detalle (a diferencia de la mayoría de los demás registros) y un buen 70% de las implantaciones de prótesis de rodilla que se realizan allí se llevan a cabo con ayuda de tecnología informática y robótica. El método asistido por robot ya representará el 16,6% de las sustituciones totales de rodilla en 2021 y hasta el 30% de las sustituciones parciales.
En los datos del registro de 2021, se muestra una ventaja mínima de la robótica en las prótesis totales de rodilla para la tasa de revisión a 3 años registrada hasta la fecha, pero actualmente sin una significación estadística clara. En este caso, el seguimiento a más largo plazo está por ver.
En las prótesis parciales de rodilla -por lo general una operación en la que la precisión de la colocación de la prótesis desempeña un papel más importante y es más propensa a errores- surge un panorama interesante: El informe anual del registro de prótesis de 2019 mostró una ventaja altamente significativa de la prótesis parcial de rodilla asistida por robot sobre el estándar manual al cabo de 3 años. En aquel momento, estos datos se referían casi exclusivamente al sistema MAKO y a los grandes centros especializados que fueron los primeros en introducir la técnica. En el informe actual de 2021, este efecto de la reducción de la tasa de complicaciones ya no es significativo. Una posible explicación de ello son las tecnologías, ahora muy diferentes, que se resumen aquí bajo el término “robotizado” y también los numerosos nuevos usuarios, que posiblemente influyan en los datos con su curva de aprendizaje. Al igual que antes, la prótesis parcial utilizada junto con la tecnología MAKO es la que presenta la tasa de revisión más baja en el Registro Australiano. En SIRIS, sólo puede identificarse claramente la prótesis parcial MAKO [2]. También en este caso la tasa de revisión a los dos años es significativamente inferior a la media: 1,8% frente a 4,6%. Si volvemos a examinar los datos de los metaanálisis y de los grandes centros específicamente para las prótesis parciales de rodilla, también encontramos una diferencia estadísticamente significativa en la tasa de revisión por tecnología robótica [27,28].
Curva de aprendizaje y costes
Como se acaba de mencionar, es bastante concebible que la curva de aprendizaje del operador influya en los parámetros analizados. En la actualidad, la bibliografía evalúa principalmente la curva de aprendizaje en relación con el tiempo de funcionamiento. Aquí se demuestra que el trabajo eficaz con el robot se aprende rápidamente y que tras sólo unos pocos casos (7-20 según el autor) se consigue un tiempo de funcionamiento reproducible y sólo ligeramente prolongado [26,29]. Algunos trabajos pueden incluso demostrar que es posible una mayor reducción del tiempo de operación en el curso hasta que sea neutral al flujo de trabajo pre-robótico después de unos 100 casos. Sin embargo, esto requiere un elevado número de casos y un alto porcentaje de adaptación de la tecnología.
En cuanto a la precisión quirúrgica, es decir, la ejecución exacta de los cortes de sierra, no parece haber una curva de aprendizaje significativa [30]. Hemos podido demostrar en un estudio que incluso un cirujano con menos experiencia puede realizar una implantación de gran precisión gracias a la técnica robótica [31]. Sin embargo, la tasa de complicaciones siguió aumentando en estos cirujanos inexpertos en comparación con los datos presentados para los centros especializados con experiencia en robots.
Esto me lleva a un punto de discusión esencial de la curva de aprendizaje que está poco representado en la literatura: la toma de decisiones intraoperatorias adecuadas. La asistencia robótica ayuda claramente al cirujano en la ejecución mejorada de un plan quirúrgico, pero no en la creación y el ajuste fino de este plan (al menos según el estado actual de la técnica). Proporciona muchos datos e información adicionales sobre la articulación y los parámetros dinámicos que deben ser registrados e interpretados por el cirujano. También pueden producirse errores y la prótesis puede no estar colocada de forma óptima incluso en la fase de planificación. En este sentido, se requiere un alto nivel de experiencia con los sistemas, así como un aprendizaje permanente basado en los parámetros disponibles para mejorar y seguir desarrollando los algoritmos de decisión. Esta circunstancia representa un cierto obstáculo para muchos operadores a la hora de adaptarse a la nueva tecnología. Así pues, parece indispensable un alto grado de especialización y de casuística con la robótica, a pesar del apoyo tecnológico activo.
Un segundo factor en este contexto se refiere a los costes adicionales de las tecnologías, que no se reflejan en el sistema de remuneración actual y dificultan el uso generalizado de la robótica. Según otro estudio, los costes adicionales ascienden a unos 1.600-2.500 francos suizos por procedimiento, en función de la tecnología utilizada (sin imágenes frente a con TAC) [32]. Existe una dependencia parcial del número de casos y también de la eficacia de los procesos de trabajo del cirujano y del departamento de operaciones. En este caso, la planificación y el ajuste intraoperatorios puros parecen requerir más tiempo que una opción de planificación preoperatoria.
Resultado del paciente
Por último, uno de los factores decisivos para evaluar el valor añadido de la robótica en las intervenciones articulares sigue siendo la mejora de los resultados y la satisfacción del paciente. Esta es la única forma de justificar en última instancia los costes adicionales, si el efecto de la reducción de costes a través de la reducción de las operaciones de revisión es actualmente bastante pequeño.
Ya existen algunos datos buenos y fiables sobre las prótesis parciales de rodilla. Canetti y sus coautores describen un retorno más rápido a la capacidad deportiva tras una prótesis parcial asistida por robot [33]. El grupo de investigación dirigido por Marc Blyth pudo demostrar en un estudio prospectivo, aleatorizado y doble ciego que las rodillas robotizadas mostraban una rehabilitación más rápida de media y menos dolor postoperatorio que el grupo de comparación operado convencionalmente [34]. Sin embargo, 1 año después de la operación no se detectaron diferencias significativas. Este efecto se ha descrito en otros estudios. En interpretación, la reducción del dolor postoperatorio se debe presumiblemente a la técnica quirúrgica más suave con los tejidos blandos, que se aplica sobre todo a las fresas controladas por robot (MAKO, NAVIO).
La situación de los datos para las prótesis totales de rodilla también es bastante positiva. Un metaanálisis publicado recientemente muestra un beneficio significativo para la función de la rodilla y los resultados comunicados por los pacientes con respecto a la sustitución total de rodilla asistida por robot – Nivel de evidencia: bueno [26]. De forma análoga a las experiencias descritas con la PSI, destacan especialmente los estudios que utilizan la posibilidad de la planificación virtual tridimensional de forma que la prótesis se implante de forma individualizada para el paciente. Varios autores aclaran que el resultado es significativamente mejor si se puede reconstruir la anatomía preartrósica con la prótesis [35-37]. Seguir los mismos conceptos de orientación mecánica que los derivados de la técnica manual no mejora el resultado del paciente.
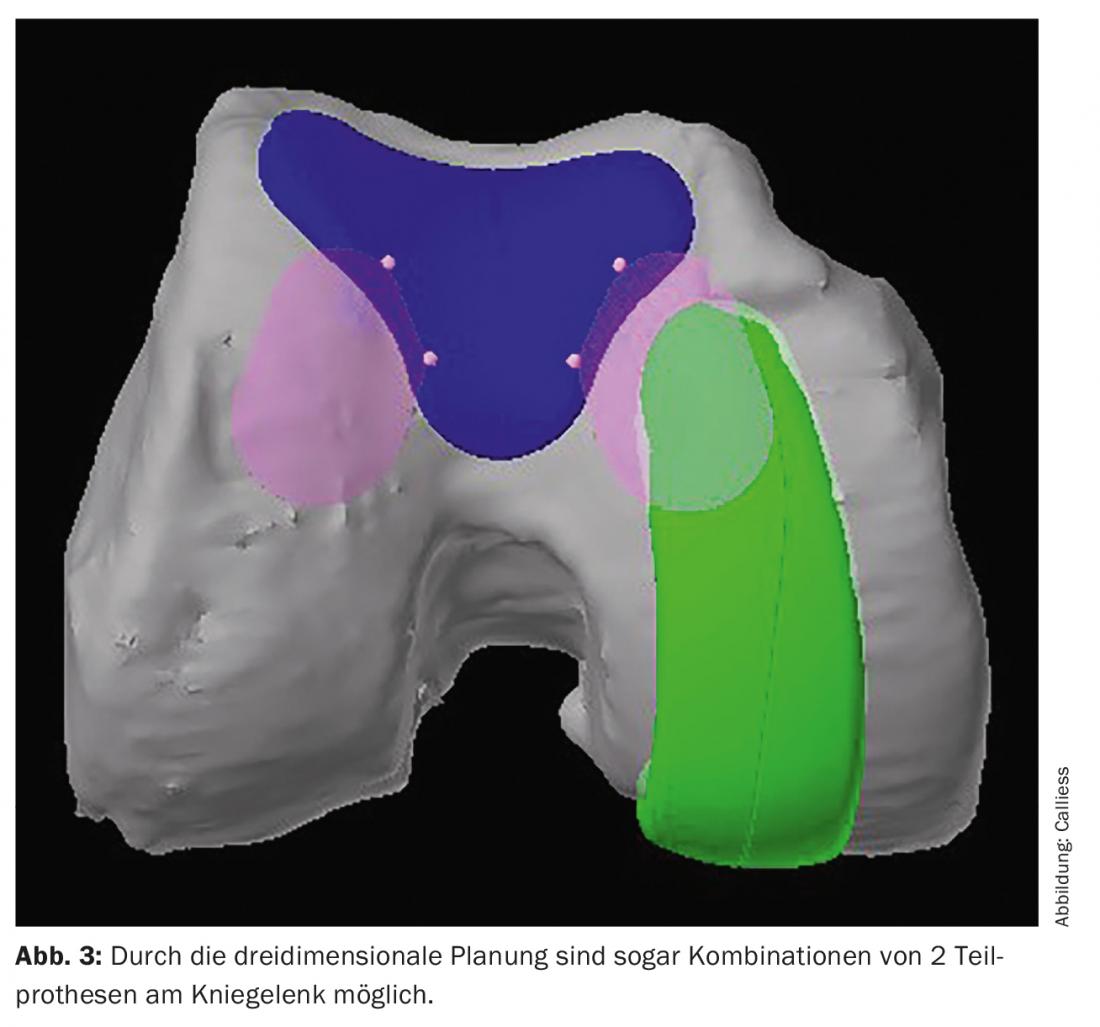
Otro aspecto interesante para mejorar el resultado de los pacientes es el uso más frecuente de soluciones protésicas parciales en lugar de prótesis totales con ayuda de la robótica. O la combinación de dos prótesis parciales con conservación de los ligamentos cruzados en lugar de una prótesis total con resección de los ligamentos cruzados (fig. 3). Como se ha demostrado, uno de los principales argumentos en contra de la prótesis parcial -el aumento de la tasa de revisión- parece estar bien resuelto con el apoyo robótico. Dado que la prótesis parcial es superior a la prótesis total en cuanto al resultado para el paciente cuando se indica correctamente, un aumento en la proporción de prótesis parciales ya es una mejora en el resultado para el paciente. Por ejemplo, actualmente realizamos alrededor del 45% de nuestras implantaciones de prótesis de rodilla como prótesis parciales, al contrario que la media suiza, que actualmente se sitúa en torno al 17% [2].
¿Valor añadido o marketing?
Si ahora volvemos brevemente a la pregunta inicial formulada de forma un tanto publicitaria, se puede resumir que en el ámbito de las prótesis parciales de rodilla se ha demostrado un verdadero valor añadido mediante el apoyo robótico. Aunque el resultado para el paciente de una prótesis parcial asistida por robot a medio plazo no es necesariamente mejor que el de una operada convencionalmente, la rehabilitación se acorta y el riesgo de revisión se reduce significativamente. Si se implantan más prótesis parciales en lugar de prótesis totales gracias al uso de robots, el sistema sanitario también se beneficiará desde un punto de vista económico general: las prótesis parciales tienen comparativamente menos complicaciones, una mayor calidad de vida y unos costes generales de tratamiento más bajos. Los costes adicionales debidos al uso de robots son absorbidos por estos efectos.
En el caso de las prótesis totales de rodilla, el valor añadido confirmado científicamente en términos de rehabilitación y riesgo de revisión está aún menos claramente demostrado. Sin embargo, la robótica muestra el valor añadido de que se puede tener más en cuenta la anatomía natural del paciente y es posible una individualización de la terapia basada en parámetros objetivos de decisión. Se ha demostrado que esto tiene el potencial de mejorar la calidad de la atención y los resultados. Sin embargo, si se aplican los mismos principios quirúrgicos de las prótesis de rodilla convencionales, el valor añadido es bajo.
Mensajes para llevarse a casa
- En Suiza, sólo un 3% de las prótesis de rodilla cuentan actualmente con soporte robótico.
- La asistencia robótica guiada por imagen conlleva una reducción significativa de la tasa de revisión de las hemiprótesis de rodilla (1,8% frente a 4,6% al cabo de 2 años).
- En el caso de las prótesis totales de rodilla, es posible una adaptación/alineación individualizada de la prótesis con gran precisión. Esto mejora el resultado para el paciente.
- Desventajas actuales: elevados costes de funcionamiento y curva de aprendizaje para el operador individual.
Literatura:
- Rodriguez-Merchan EC: Satisfacción de los pacientes tras una artroplastia total de rodilla primaria: factores que contribuyen. Arch Bone Jt Surg 2021; 9 (4): 379-386; doi: 10.22038/abjs.2020.46395.2274.
- Informe anual del Registro Nacional Suizo de Articulaciones, Cadera y Rodilla 2012-2021. https://swiss-medtech.ch/news/siris-report-2021
- Beckmann J, Meier MK, Benignus C, et al: Artroplastia de rodilla contemporánea: ¿una para todos o la hora de la diversidad? Arch Orthop Trauma Surg 2021; 141 (12): 2185-2194; doi: 10.1007/s00402-021-04042-4.
- Riviere C, Lazic S, Boughton O, et al: Conceptos actuales para alinear implantes de rodilla: ¿específicos para cada paciente o sistemáticos? EFORT Open Rev 2018; 3 (1): 1-6; doi: 10.1302/2058-5241.3.170021.
- Riviere C, Iranpour F, Auvinet E, et al: Opciones de alineación para la artroplastia total de rodilla: una revisión sistemática. Orthop Traumatol Surg Res 2017; 103 (7): 1047-1056; doi: 10.1016/j.otsr.2017.07.010.
- Ettinger M, Tucking LR, Savov P: [Kinematic alignment in total knee arthroplasty with image-based and image-independent robotic support]. Ortopedia 2020; 49(7): 604-610; doi: 10.1007/s00132-020-03924-6.
- Urish KL, Conditt M, Roche M, Rubash HE: Artroplastia total de rodilla robótica: Asistente quirúrgico para una rodilla cinemática normal personalizada. Ortopedia 2016; 39(5): e822-827; doi: 10.3928/01477447-20160623-13.
- Cheng T, Zhao S, Peng X, Zhang X: ¿Mejora la cirugía asistida por ordenador la alineación postoperatoria de la pierna y la colocación del implante tras una artroplastia total de rodilla? ¿Un metaanálisis de ensayos controlados aleatorios? Cirugía de rodilla, traumatología deportiva, artroscopia: revista oficial de la ESSKA 2012; 20(7): 1307-1322; doi: 10.1007/s00167-011-1588-8.
- Fu Y, Wang M, Liu Y, Fu Q: Resultados de la alineación en la artroplastia total de rodilla con navegación: un metaanálisis. Cirugía de rodilla, traumatología deportiva, artroscopia: revista oficial de la ESSKA 2012; 20 (6): 1075-1082; doi: 10.1007/s00167-011-1695–1696.
- Baier C, Wolfsteiner J, Otto F, et al: Resultados clínicos, radiológicos y de supervivencia tras diez años comparando la artroplastia total de rodilla con navegación y la convencional: un análisis de pares emparejados. Ortopedia internacional 2017; 41(10): 2037-2044; doi: 10.1007/s00264-017-3509-z.
- Informe anual 2021 del Registro Nacional de Sustitución Articular de la Asociación Ortopédica Australiana. https://aoanjrr.sahmri.com/annual-reports-2021.
- Lee DY, Park YJ, Hwang SC, et al: No hay diferencias en los resultados a medio y largo plazo de la navegación asistida por ordenador frente a la artroplastia total de rodilla convencional. Cirugía de rodilla, traumatología deportiva, artroscopia: revista oficial de la ESSKA 2020; 28(10): 3183-3192; doi: 10.1007/s00167-019-05808-5.
- Calliess T, Ettinger M, Stukenborg-Colsmann C, Windhagen H: [Alineación cinemática a medida en artroplastia total de rodilla mediante PSI. La historia de la tecnología ShapeMatch]. La Ortopedia 2016; 45 (4): 314-321; doi: 10.1007/s00132-016-3240-2.
- Thienpont E, Schwab PE, Fennema P: Eficacia de los instrumentos específicos para pacientes en la artroplastia total de rodilla: revisión sistemática y metaanálisis. The Journal of bone and joint surgery American 2017; 99 (6): 521-530; doi: 10.2106/JBJS.16.00496.
- Woon JTK, Zeng ISL, Calliess T, et al: Outcome of kinematic alignment using patient-specific instrumentation versus mechanical alignment in TKA: a meta-analysis and subgroup analysis of randomised trials. Arch Orthop Trauma Surg 2018; 138(9): 1293-1303; doi: 10.1007/s00402-018-2988-8.
- Calliess T, Bauer K, Stukenborg-Colsman C, et al: Alineación cinemática PSI frente a alineación mecánica no PSI en la artroplastia total de rodilla: un estudio prospectivo y aleatorizado. Cirugía de rodilla, traumatología deportiva, artroscopia : revista oficial de la ESSKA 2017; 25(6): 1743-1748; doi: 10.1007/s00167-016-4136-8.
- Fucentese SF, Koch PP: Un novedoso sistema de guía quirúrgica basado en la realidad aumentada para la artroplastia total de rodilla. Arch Orthop Trauma Surg 2021; 141(12): 2227-2233; doi: 10.1007/s00402-021-04204-4.
- Roche M: El sistema de artroplastia de rodilla con brazo robótico MAKO. Arch Orthop Trauma Surg 2021; 141(12): 2043-2047; doi: 10.1007/s00402-021-04208-0.
- Sicat CS, Chow JC, Kaper B, et al: Precisión en la colocación de componentes en dos generaciones de artroplastia de rodilla asistida por robot manual. Arch Orthop Trauma Surg 2021; 141(12): 2059-2067; doi: 10.1007/s00402-021-04040-6.
- Shatrov J, Murphy GT, Duong J, Fritsch B: Artroplastia total de rodilla asistida por robot con la plataforma OMNIBot: una revisión de los principios de uso y los resultados. Arch Orthop Trauma Surg 2021; 141(12): 2087-2096; doi: 10.1007/s00402-021-04173-8.
- Batailler C, Hannouche D, Benazzo F, Parratte S: Conceptos y técnicas de una nueva técnica asistida por robot para la artroplastia total de rodilla: el sistema de rodilla ROSA. Arch Orthop Trauma Surg 2021; 141(12): 2049-2058; doi: 10.1007/s00402-021-04048-y.
- Parratte S, Price AJ, Jeys LM, et al: Precisión de una nueva técnica asistida por robot para la artroplastia total de rodilla: un estudio cadavérico. J Arthroplasty 2019; 34(11): 2799-2803; doi: 10.1016/j.arth.2019.06.040.
- Batailler C, Fernandez A, Swan J, et al: El sistema MAKO asistido por brazo robótico basado en TC es un procedimiento fiable para la artroplastia total de rodilla: una revisión sistemática. Knee Surg Sports Traumatol Arthrosc 2021; 29(11): 3585-3598; doi: 10.1007/s00167-020-06283-z.
- Batailler C, Bordes M, Lording T, et al: Dimensionamiento mejorado con el sistema asistido por robot basado en imágenes en comparación con las técnicas sin imágenes y convencionales en la artroplastia unicompartimental medial de rodilla. Bone Joint J 2021; 103-B(4): 610-618; doi: 10.1302/0301-620X.103B4.BJJ-2020-1453.R1.
- Chin BZ, Tan SSH, Chua KCX, et al: Artroplastia total y unicompartimental de rodilla asistida por robot frente a convencional: un metaanálisis de los resultados radiológicos y funcionales. J Knee Surg 2021; 34(10): 1064-1075; doi: 10.1055/s-0040-1701440.
- Zhang J, Ndou WS, Ng N, et al: La artroplastia total de rodilla asistida por brazo robótico se asocia a una mejora de la precisión y de los resultados comunicados por los pacientes: una revisión sistemática y un metaanálisis. Knee Surg Sports Traumatol Arthrosc 2021; doi: 10.1007/s00167-021-06464-4.
- Batailler C, White N, Ranaldi FM, et al: Mejor posición del implante y menor tasa de revisión con la artroplastia unicompartimental de rodilla asistida por robot. Knee Surg Sports Traumatol Arthrosc 2019; 27(4): 1232-1240; doi: 10.1007/s00167-018-5081-5.
- Sun Y, Liu W, Hou J, et al: ¿Tiene la artroplastia unicompartimental de rodilla asistida por robot menores tasas de complicaciones y revisiones que el procedimiento convencional? Una revisión sistemática y un metaanálisis. BMJ Open 2021; 11(8): e044778; doi: 10.1136/bmjopen-2020-044778.
- Chen Z, Bhowmik-Stoker M, Palmer M, et al: Curva de aprendizaje basada en el tiempo para la artroplastia total de rodilla asistida por robot: un estudio multicéntrico. J Knee Surg 2022; doi: 10.1055/s-0042-1744193.
- Vermue H, Luyckx T, Winnock de Grave P, et al: La artroplastia total de rodilla asistida por robot se asocia a una curva de aprendizaje en cuanto al tiempo quirúrgico, pero no en cuanto a la alineación de los componentes, la alineación de la extremidad y el equilibrio de los espacios. Knee Surg Sports Traumatol Arthrosc 2022; 30(2): 593-602; doi: 10.1007/s00167-020-06341-6.
- Savov P, Tuecking LR, Windhagen H et al: La robótica mejora la precisión de la alineación y reduce las tasas de revisión precoz de la UKA en manos de cirujanos de UKA de bajo volumen. Arch Orthop Trauma Surg 2021; 141(12): 2139-2146; doi: 10.1007/s00402-021-04114-5.
- Christen B, Tanner L, Ettinger M, et al: Análisis comparativo de costes de cuatro tecnologías diferentes asistidas por ordenador para implantar una artroplastia total de rodilla frente a la instrumentación convencional. J Pers Med 2022; 12(2); doi: 10.3390/jpm12020184.
- Canetti R, Batailler C, Bankhead C, et al: Retorno más rápido al deporte tras una artroplastia lateral unicompartimental de rodilla asistida por robot: un estudio comparativo. Arch Orthop Trauma Surg 2018; 138 (12): 1765-1771; doi: 10.1007/s00402-018-3042-6.
- Gilmour A, MacLean AD, Rowe PJ, et al: Artroplastia unicompartimental de rodilla asistida por brazo robótico frente a artroplastia unicompartimental convencional. Los resultados clínicos a los 2 años de un ensayo controlado aleatorizado. J Arthroplasty 2018; 33 (7S): S109-S115; doi: 10.1016/j.arth.2018.02.050.
- Huber K, Christen B, Calliess S, Calliess T: True Kinematic Alignment Is Applicable in 44% of Patients Applying Restrictive Indication Criteria-A Retrospective Analysis of 111 TKA Using Robotic Assistance. J Pers Med 2021; 11 (7); doi: 10.3390/jpm11070662.
- Winnock de Grave P, Luyckx T, Claeys K, et al: Mayor satisfacción tras una artroplastia total de rodilla con alineación cinemática inversa restringida en comparación con la alineación mecánica ajustada. Knee Surg Sports Traumatol Arthrosc 2022; 30 (2): 488-499; doi: 10.1007/s00167-020-06165-4.
- Elbuluk AM, Jerabek SA, Suhardi VJ, et al: Comparación cabeza a cabeza de la alineación cinemática frente a la alineación mecánica para la artroplastia total de rodilla. J Arthroplasty 2022; doi: 10.1016/j.arth.2022.01.052.
PRÁCTICA GP 2022; 18(4): 6-13